

Flexible Tactile Sensor Array for Slippage and Grooved Surface Recognition in Sliding Movement
- PMID: 31480392
- PMCID: PMC6780987
- DOI: 10.3390/mi10090579
Flexible Tactile Sensor Array for Slippage and Grooved Surface Recognition in Sliding Movement
Abstract
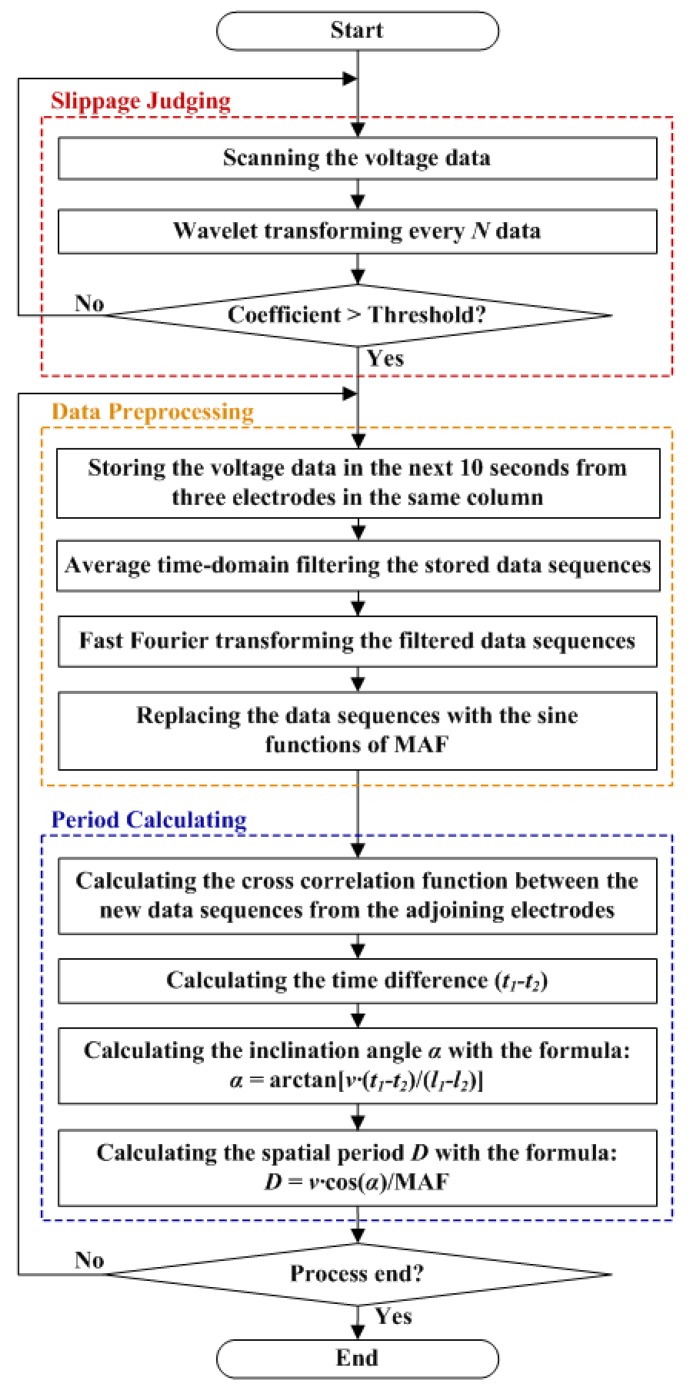
Flexible tactile sensor with contact force sensing and surface texture recognition abilities is crucial for robotic dexterous grasping and manipulation in daily usage. Different from force sensing, surface texture discrimination is more challenging in the development of tactile sensors because of limited discriminative information. This paper presents a novel method using the finite element modeling (FEM) and phase delay algorithm to investigate the flexible tactile sensor array for slippage and grooved surfaces discrimination when sliding over an object. For FEM modeling, a 3 × 3 tactile sensor array with a multi-layer structure is utilized. For sensor array sliding over a plate surface, the initial slippage occurrence can be identified by sudden changes in normal forces based on wavelet transform analysis. For the sensor array sliding over pre-defined grooved surfaces, an algorithm based on phase delay between different sensing units is established and then utilized to discriminate between periodic roughness and the inclined angle of the grooved surfaces. Results show that the proposed tactile sensor array and surface texture recognition method is anticipated to be useful in applications involving human-robotic interactions.
Keywords: finite element modeling; grooved surface; inclined angle; spectral analysis; surface texture; tactile sensor array; wavelet transform.
Conflict of interest statement
The authors declare no conflict of interest.
Figures









References
-
- Dahiya R.S., Metta G., Valle M., Sandini G. Tactile sensing—from humans to humanoids. IEEE Trans. Robot. 2010;26:1–20. doi: 10.1109/TRO.2009.2033627. - DOI
-
- Damian D., Martinez H., Dermitzakis K. Artificial ridged skin for slippage speed detection in prosthetic hand application; Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems; Taipei, Taiwan. 18–22 October 2010; pp. 904–909.
-
- Youref H., Boukallel M., Althoefer K. Tactile sensing for dexterous in-hand manipulation in robotics—A review. Sens. Actuator A Phys. 2011;167:171–187.
LinkOut - more resources
Full Text Sources
