

System Integration and Preliminary Clinical Evaluation of a Robotic System for MRI-Guided Transperineal Prostate Biopsy
- PMID: 31485544
- PMCID: PMC6726403
- DOI: 10.1142/S2424905X19500016
System Integration and Preliminary Clinical Evaluation of a Robotic System for MRI-Guided Transperineal Prostate Biopsy
Abstract
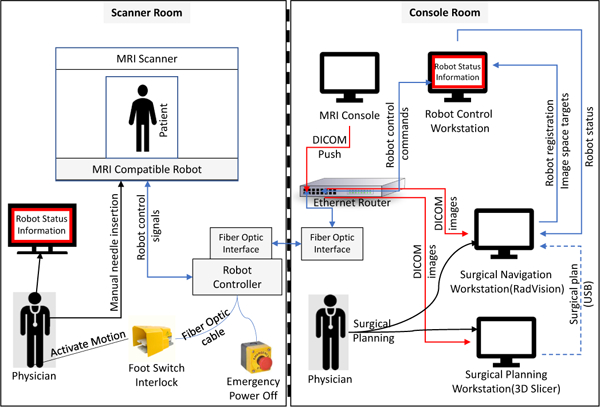
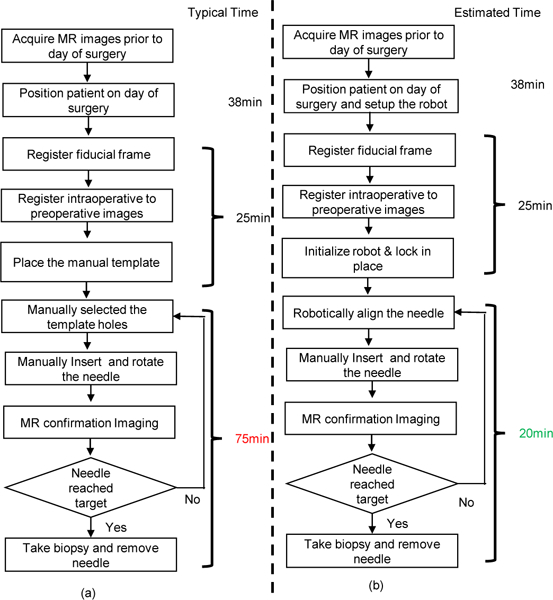
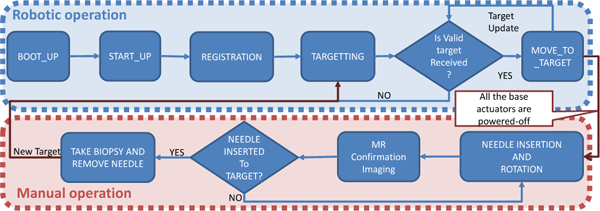
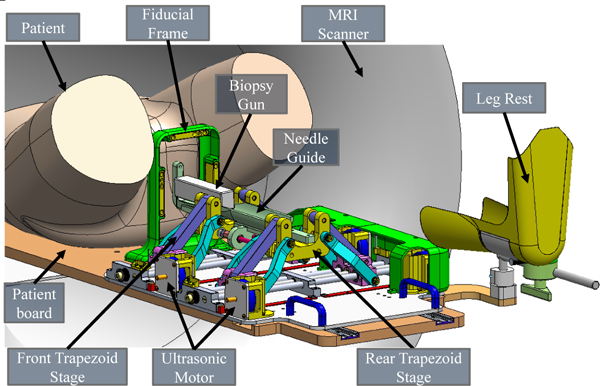
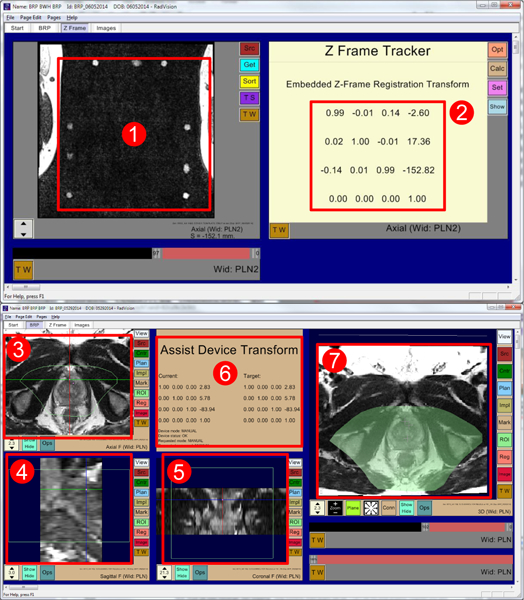
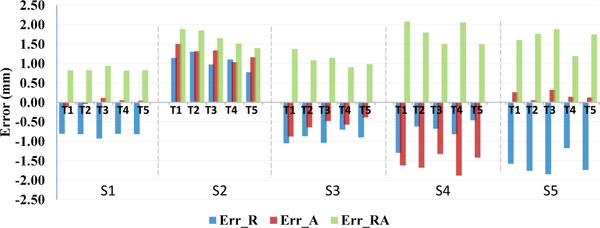
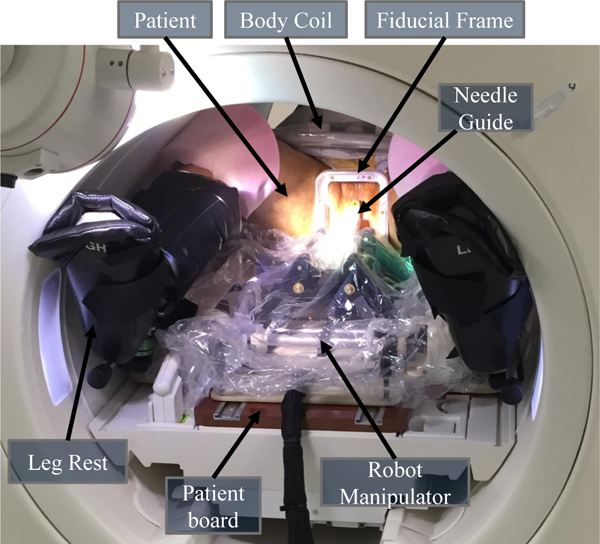
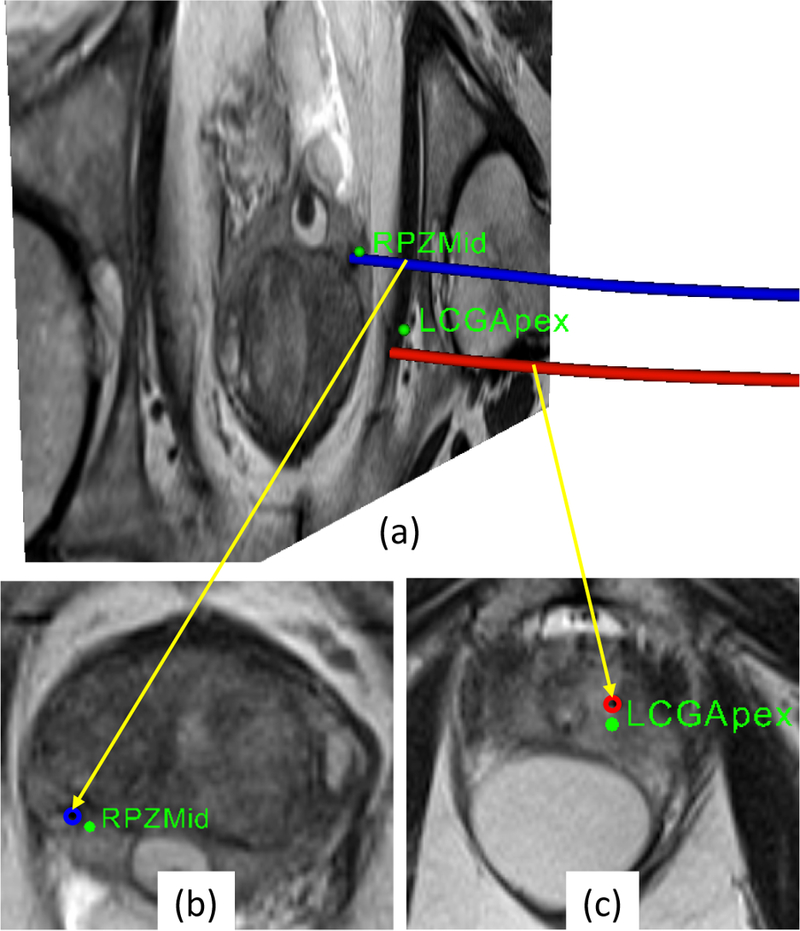
This paper presents the development, preclinical evaluation, and preliminary clinical study of a robotic system for targeted transperineal prostate biopsy under direct interventional magnetic resonance imaging (MRI) guidance. The clinically integrated robotic system is developed based on a modular design approach, comprised of surgical navigation application, robot control software, MRI robot controller hardware, and robotic needle placement manipulator. The system provides enabling technologies for MRI-guided procedures. It can be easily transported and setup for supporting the clinical workflow of interventional procedures, and the system is readily extensible and reconfigurable to other clinical applications. Preclinical evaluation of the system is performed with phantom studies in a 3 Tesla MRI scanner, rehearsing the proposed clinical workflow, and demonstrating an in-plane targeting error of 1.5mm. The robotic system has been approved by the institutional review board (IRB) for clinical trials. A preliminary clinical study is conducted with the patient consent, demonstrating the targeting errors at two biopsy target sites to be 4.0mm and 3.7mm, which is sufficient to target a clinically significant tumor foci. First-in-human trials to evaluate the system's effectiveness and accuracy for MR image-guide prostate biopsy are underway.
Keywords: MRI-compatible robotic system; MRI-guided prostate biopsy; image-guided surgery; piezoelectric actuation.
Figures

References
-
- Hricak H, Choyke PL, Eberhardt SC, Leibel SA and Scardino PT, Imaging prostate cancer: A multidisciplinary perspective 1, Radiology 243(1) (2007) 28–53. - PubMed
-
- Kadoury S, Yan P, Xu S, Glossop N, Choyke P, Turkbey B, Pinto P, Wood BJ and Kruecker J, Realtime trus/mri fusion targeted-biopsy for prostate cancer: a clinical demonstration of increased positive biopsy rates, International Workshop on Prostate Cancer Imaging, Springer; (2010), pp. 52–62.
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources