

Multi-stimuli-responsive programmable biomimetic actuator
- PMID: 31501430
- PMCID: PMC6733902
- DOI: 10.1038/s41467-019-12044-5
Multi-stimuli-responsive programmable biomimetic actuator
Abstract
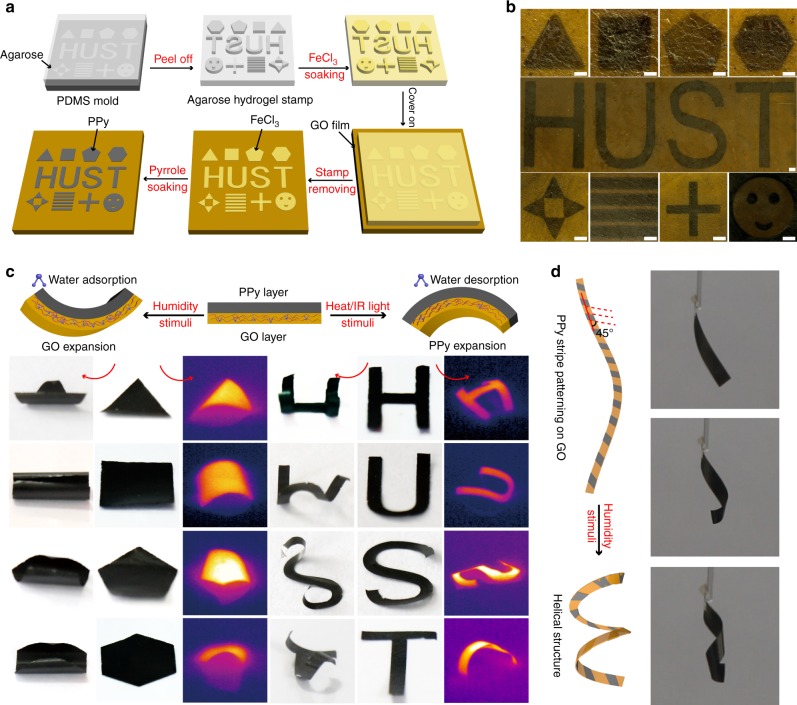
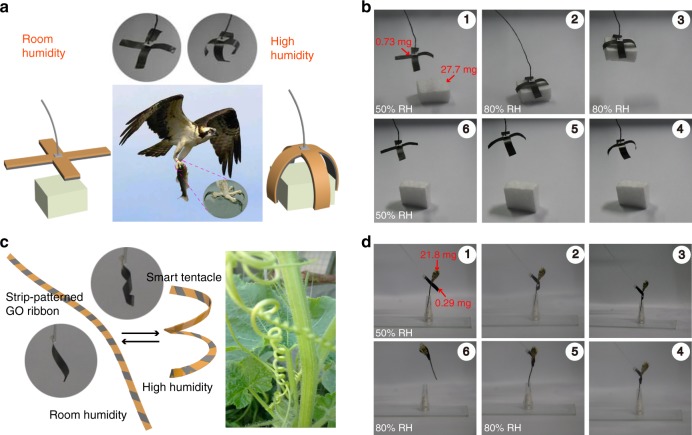
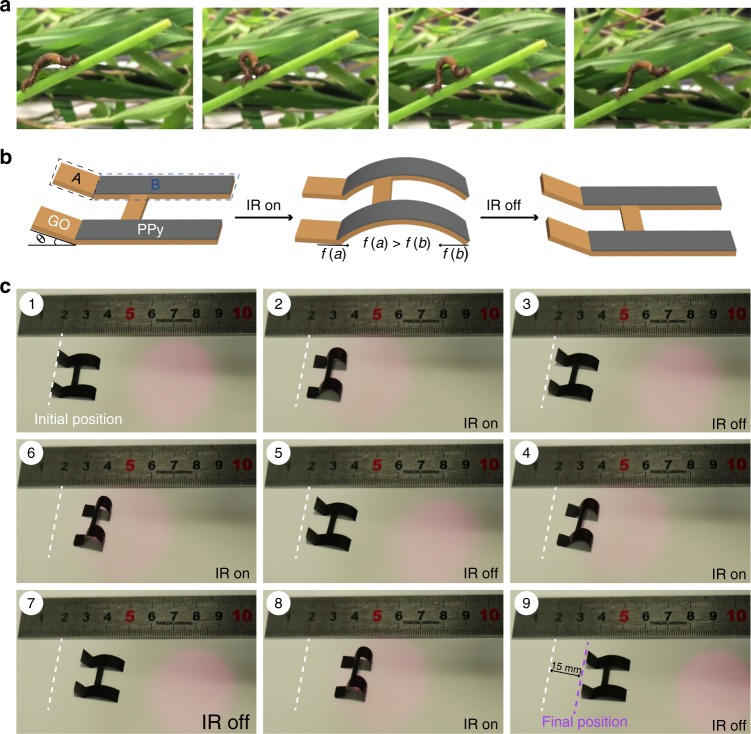
Untethered small actuators have various applications in multiple fields. However, existing small-scale actuators are very limited in their intractability with their surroundings, respond to only a single type of stimulus and are unable to achieve programmable structural changes under different stimuli. Here, we present a multiresponsive patternable actuator that can respond to humidity, temperature and light, via programmable structural changes. This capability is uniquely achieved by a fast and facile method that was used to fabricate a smart actuator with precise patterning on a graphene oxide film by hydrogel microstamping. The programmable actuator can mimic the claw of a hawk to grab a block, crawl like an inchworm, and twine around and grab the rachis of a flower based on their geometry. Similar to the large- and small-scale robots that are used to study locomotion mechanics, these small-scale actuators can be employed to study movement and biological and living organisms.
Conflict of interest statement
The authors declare no competing interests.
Figures
References
Publication types
MeSH terms
Substances
LinkOut - more resources
Full Text Sources
Molecular Biology Databases
