

The Design Principles of Biochemical Timers: Circuits that Discriminate between Transient and Sustained Stimulation
- PMID: 31521602
- PMCID: PMC6763348
- DOI: 10.1016/j.cels.2019.07.008
The Design Principles of Biochemical Timers: Circuits that Discriminate between Transient and Sustained Stimulation
Abstract
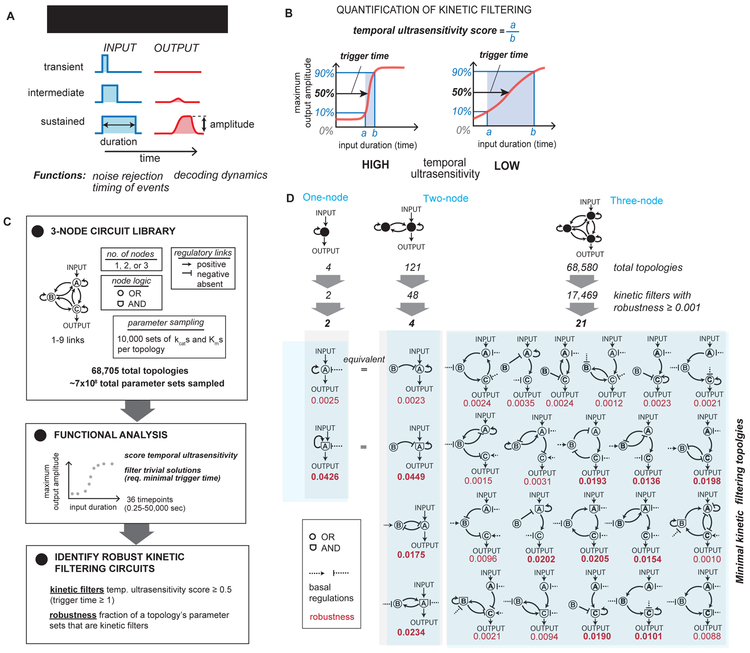
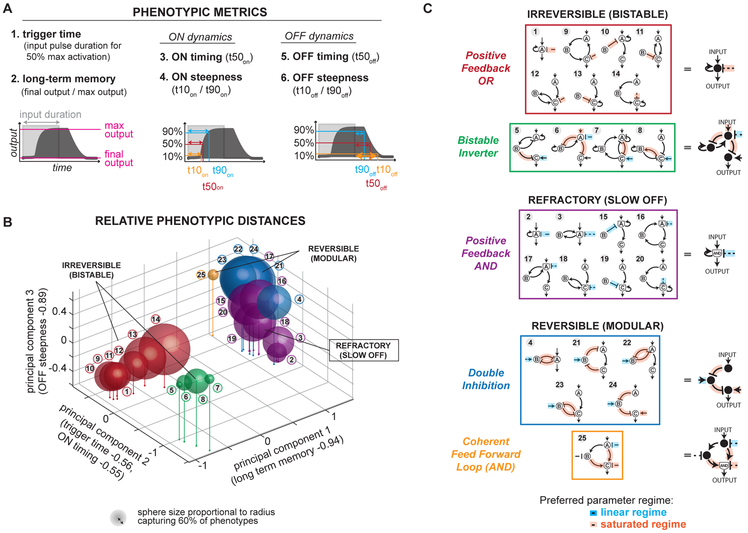
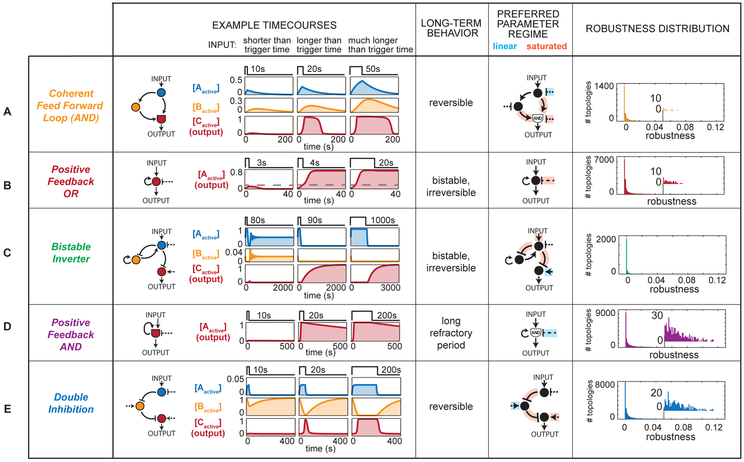
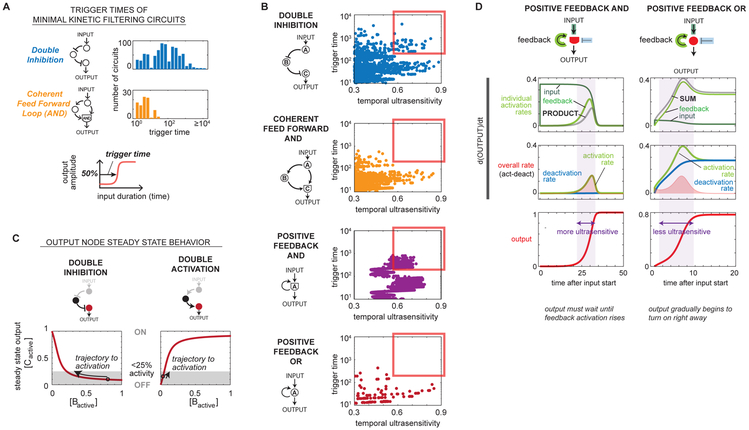
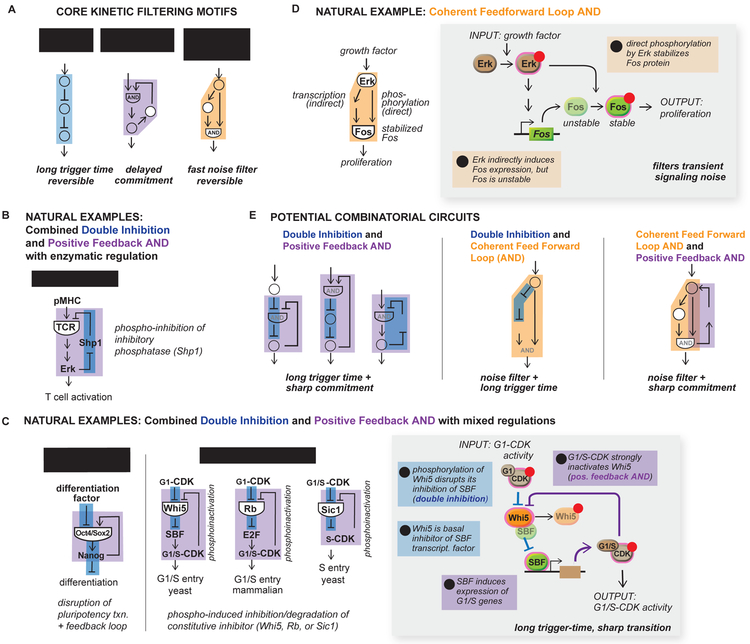
Many cellular responses for which timing is critical display temporal filtering-the ability to suppress response until stimulated for longer than a given minimal time. To identify biochemical circuits capable of kinetic filtering, we comprehensively searched the space of three-node enzymatic networks. We define a metric of "temporal ultrasensitivity," the steepness of activation as a function of stimulus duration. We identified five classes of core network motifs capable of temporal filtering, each with distinct functional properties such as rejecting high-frequency noise, committing to response (bistability), and distinguishing between long stimuli. Combinations of the two most robust motifs, double inhibition (DI) and positive feedback with AND logic (PFAND), underlie several natural timer circuits involved in processes such as cell cycle transitions, T cell activation, and departure from the pluripotent state. The biochemical network motifs described in this study form a basis for understanding common ways cells make dynamic decisions.
Keywords: biochemical circuits; kinetic filtering; networks; signal transduction.
Published by Elsevier Inc.
Conflict of interest statement
DECLARATION OF INTERESTS
The authors declare no competing interests.
Figures
Similar articles
-
Polyphasic feedback enables tunable cellular timers.Curr Biol. 2014 Oct 20;24(20):R994-5. doi: 10.1016/j.cub.2014.08.030. Epub 2014 Oct 21. Curr Biol. 2014. PMID: 25442853 Free PMC article.
-
Robust network topologies for generating switch-like cellular responses.PLoS Comput Biol. 2011 Jun;7(6):e1002085. doi: 10.1371/journal.pcbi.1002085. Epub 2011 Jun 23. PLoS Comput Biol. 2011. PMID: 21731481 Free PMC article.
-
Processing Oscillatory Signals by Incoherent Feedforward Loops.PLoS Comput Biol. 2016 Sep 13;12(9):e1005101. doi: 10.1371/journal.pcbi.1005101. eCollection 2016 Sep. PLoS Comput Biol. 2016. PMID: 27623175 Free PMC article.
-
Design principles of biochemical oscillators.Nat Rev Mol Cell Biol. 2008 Dec;9(12):981-91. doi: 10.1038/nrm2530. Epub 2008 Oct 30. Nat Rev Mol Cell Biol. 2008. PMID: 18971947 Free PMC article. Review.
-
Cell cycle: bistability is needed for robust cycling.Curr Biol. 2005 Dec 6;15(23):R961-3. doi: 10.1016/j.cub.2005.11.012. Curr Biol. 2005. PMID: 16332526 Review.
Cited by
-
Multi-model and network inference based on ensemble estimates: avoiding the madness of crowds.J R Soc Interface. 2020 Oct;17(171):20200419. doi: 10.1098/rsif.2020.0419. Epub 2020 Oct 21. J R Soc Interface. 2020. PMID: 33081645 Free PMC article.
-
Cyclin/Forkhead-mediated coordination of cyclin waves: an autonomous oscillator rationalizing the quantitative model of Cdk control for budding yeast.NPJ Syst Biol Appl. 2021 Dec 13;7(1):48. doi: 10.1038/s41540-021-00201-w. NPJ Syst Biol Appl. 2021. PMID: 34903735 Free PMC article. Review.
-
A rationally engineered decoder of transient intracellular signals.Nat Commun. 2021 Mar 25;12(1):1886. doi: 10.1038/s41467-021-22190-4. Nat Commun. 2021. PMID: 33767179 Free PMC article.
-
The Topological Characteristics of Biological Ratio-Sensing Networks.Life (Basel). 2023 Jan 28;13(2):351. doi: 10.3390/life13020351. Life (Basel). 2023. PMID: 36836707 Free PMC article.
-
Temporal dose inversion properties of adaptive biomolecular circuits.bioRxiv [Preprint]. 2025 Feb 11:2025.02.10.636967. doi: 10.1101/2025.02.10.636967. bioRxiv. 2025. PMID: 39990486 Free PMC article. Preprint.
References
-
- Adler M, Szekely P, Mayo A, and Alon U (2017). Optimal Regulatory Circuit Topologies for Fold-Change Detection. Cell Systems 4, 171–181. - PubMed
