

Micro/Nanorobots for Biomedicine: Delivery, Surgery, Sensing, and Detoxification
- PMID: 31552379
- PMCID: PMC6759331
- DOI: 10.1126/scirobotics.aam6431
Micro/Nanorobots for Biomedicine: Delivery, Surgery, Sensing, and Detoxification
Abstract
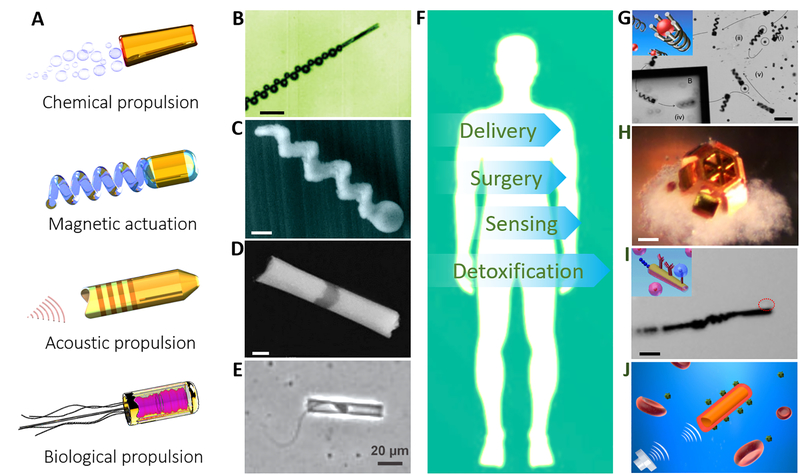
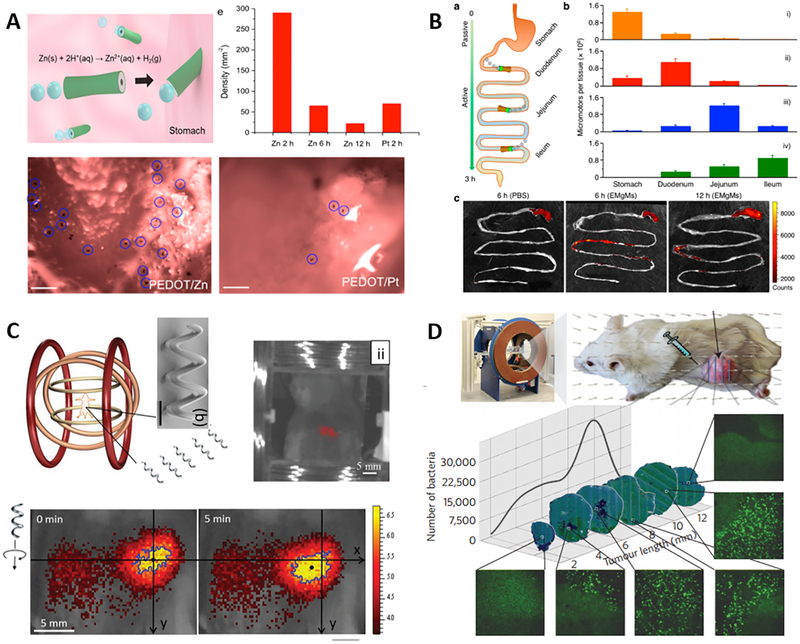
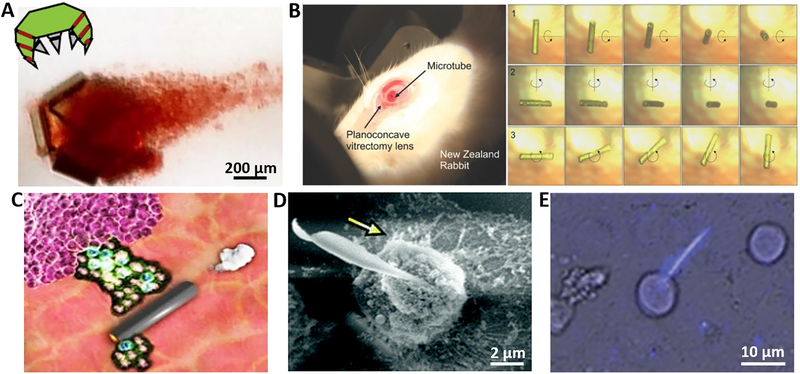
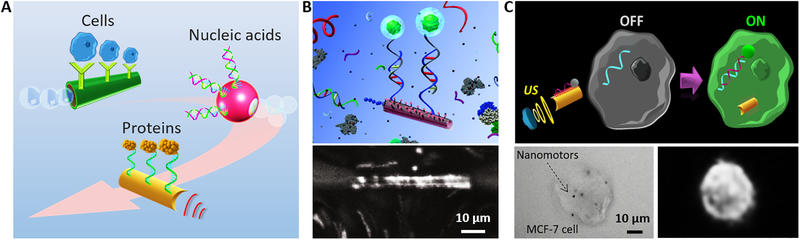
Micro- and nanoscale robots that can effectively convert diverse energy sources into movement and force represent a rapidly emerging and fascinating robotics research area. Recent advances in the design, fabrication, and operation of micro/nanorobots have greatly enhanced their power, function, and versatility. The new capabilities of these tiny untethered machines indicate immense potential for a variety of biomedical applications. This article reviews recent progress and future perspectives of micro/nanorobots in biomedicine, with a special focus on their potential advantages and applications for directed drug delivery, precision surgery, medical diagnosis and detoxification. Future success of this technology, to be realized through close collaboration between robotics, medical and nanotechnology experts, should have a major impact on disease diagnosis, treatment, and prevention.
Figures
References
-
- A roadmap for US robotics: from internet to robotics. 2016. Edition.
-
- Mack MJ, Minimally invasive and robotic surgery. JAMA 285, 568–572 (2001). - PubMed
-
- Beasley RA, Medical robots: current systems and research directions, Journal of Robotics 2012, 401613, 1–14 (2012).
-
- Nelson BJ, Kaliakatsos IK, Abbott JJ, Microrobots for minimally invasive medicine. Annu. Rev. Biomed. Eng 12, 55–85 (2010). - PubMed
Publication types
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
