

Deep Learning on Point Clouds and Its Application: A Survey
- PMID: 31561639
- PMCID: PMC6806315
- DOI: 10.3390/s19194188
Deep Learning on Point Clouds and Its Application: A Survey
Abstract
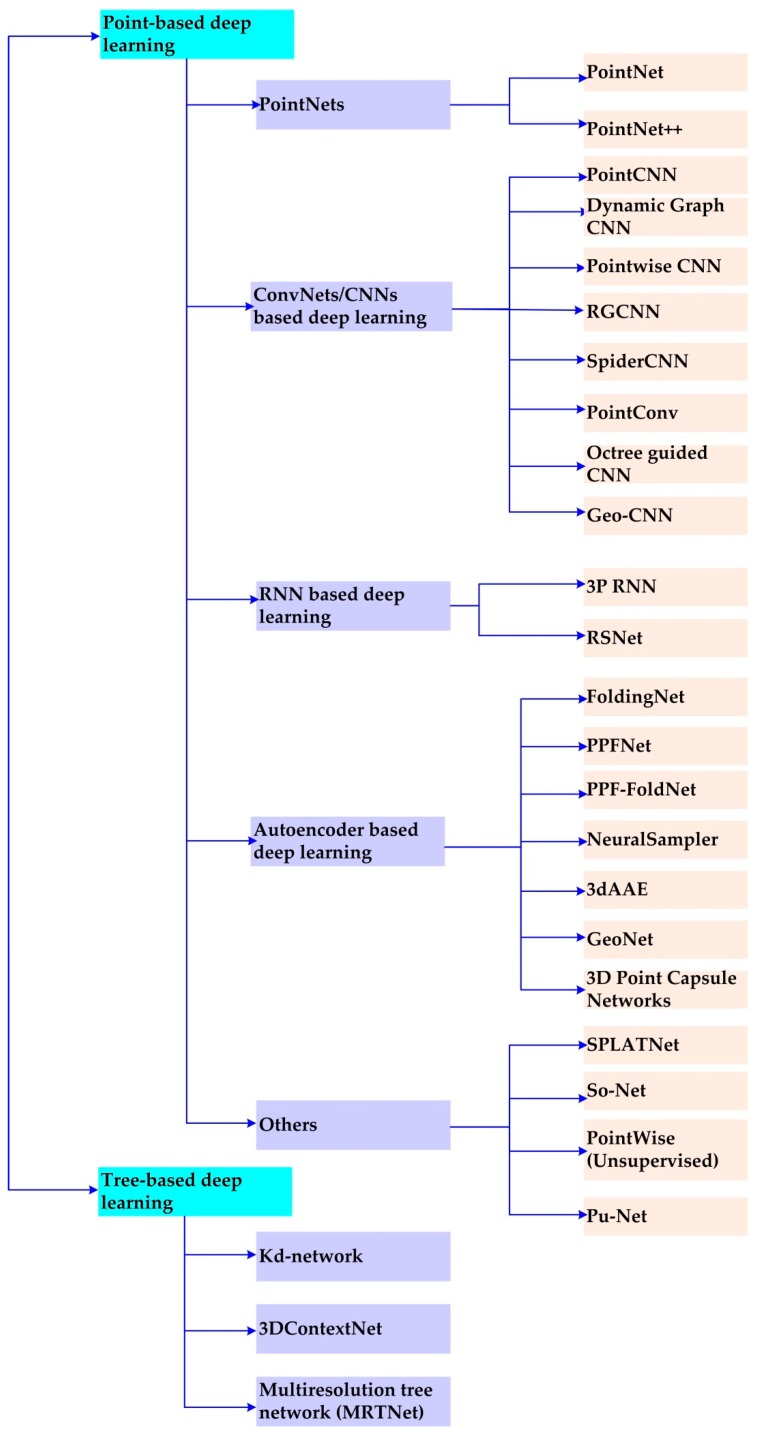
Point cloud is a widely used 3D data form, which can be produced by depth sensors, such as Light Detection and Ranging (LIDAR) and RGB-D cameras. Being unordered and irregular, many researchers focused on the feature engineering of the point cloud. Being able to learn complex hierarchical structures, deep learning has achieved great success with images from cameras. Recently, many researchers have adapted it into the applications of the point cloud. In this paper, the recent existing point cloud feature learning methods are classified as point-based and tree-based. The former directly takes the raw point cloud as the input for deep learning. The latter first employs a k-dimensional tree (Kd-tree) structure to represent the point cloud with a regular representation and then feeds these representations into deep learning models. Their advantages and disadvantages are analyzed. The applications related to point cloud feature learning, including 3D object classification, semantic segmentation, and 3D object detection, are introduced, and the datasets and evaluation metrics are also collected. Finally, the future research trend is predicted.
Keywords: application of point cloud; deep learning; feature learning; point cloud.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
Similar articles
-
FWNet: Semantic Segmentation for Full-Waveform LiDAR Data Using Deep Learning.Sensors (Basel). 2020 Jun 24;20(12):3568. doi: 10.3390/s20123568. Sensors (Basel). 2020. PMID: 32599774 Free PMC article.
-
An Efficient Ensemble Deep Learning Approach for Semantic Point Cloud Segmentation Based on 3D Geometric Features and Range Images.Sensors (Basel). 2022 Aug 18;22(16):6210. doi: 10.3390/s22166210. Sensors (Basel). 2022. PMID: 36015964 Free PMC article.
-
Deep Learning for LiDAR Point Cloud Classification in Remote Sensing.Sensors (Basel). 2022 Oct 16;22(20):7868. doi: 10.3390/s22207868. Sensors (Basel). 2022. PMID: 36298220 Free PMC article. Review.
-
Transfer Learning Based Semantic Segmentation for 3D Object Detection from Point Cloud.Sensors (Basel). 2021 Jun 8;21(12):3964. doi: 10.3390/s21123964. Sensors (Basel). 2021. PMID: 34201390 Free PMC article.
-
A Survey on Deep-Learning-Based LiDAR 3D Object Detection for Autonomous Driving.Sensors (Basel). 2022 Dec 7;22(24):9577. doi: 10.3390/s22249577. Sensors (Basel). 2022. PMID: 36559950 Free PMC article. Review.
Cited by
-
Robotics Dexterous Grasping: The Methods Based on Point Cloud and Deep Learning.Front Neurorobot. 2021 Jun 9;15:658280. doi: 10.3389/fnbot.2021.658280. eCollection 2021. Front Neurorobot. 2021. PMID: 34177509 Free PMC article. Review.
-
FWNet: Semantic Segmentation for Full-Waveform LiDAR Data Using Deep Learning.Sensors (Basel). 2020 Jun 24;20(12):3568. doi: 10.3390/s20123568. Sensors (Basel). 2020. PMID: 32599774 Free PMC article.
-
Linear optimal transport subspaces for point set classification.Res Sq [Preprint]. 2024 Mar 22:rs.3.rs-4106387. doi: 10.21203/rs.3.rs-4106387/v1. Res Sq. 2024. PMID: 38562684 Free PMC article. Preprint.
-
Recent Advancements in Learning Algorithms for Point Clouds: An Updated Overview.Sensors (Basel). 2022 Feb 10;22(4):1357. doi: 10.3390/s22041357. Sensors (Basel). 2022. PMID: 35214254 Free PMC article. Review.
-
Recent Trends, Technical Concepts and Components of Computer-Assisted Orthopedic Surgery Systems: A Comprehensive Review.Sensors (Basel). 2019 Nov 27;19(23):5199. doi: 10.3390/s19235199. Sensors (Basel). 2019. PMID: 31783631 Free PMC article. Review.
References
-
- Balsabarreiro J., Fritsch D. Generation of Visually Aesthetic and Detailed 3d Models of Historical Cities by Using Laser Scanning and Digital Photogrammetry. Digit. Appl. Archaeol. Cult. Herit. 2017;8:57–64.
-
- Balsa-Barreiro J., Fritsch D. Advances in Visual Computing, Proceedings of the 11th International Symposium (ISVC 2015), Las Vegas, NV, USA, 14–16 December 2015. Springer; Berlin/Heidelberg, Germany: 2015. Generation of 3d/4d Photorealistic Building Models. The Testbed Area for 4d Cultural Heritage World Project: The Historical Center of Calw (Germany)
-
- Oliveira M., Lopes L.S., Lim G.H., Kasaei S.H., Tomé A.M., Chauhan A. 3D object perception and perceptual learning in the RACE project. Robot. Auton. Syst. 2016;75:614–626. doi: 10.1016/j.robot.2015.09.019. - DOI
-
- Velodyne Hdl-64e Lidar Specification. [(accessed on 5 May 2019)]; Available online: https://velodynelidar.com/hdl-64e.html.
Publication types
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
