

Assessment of Stickiness with Pressure Distribution Sensor Using Offset Magnetic Force
- PMID: 31569764
- PMCID: PMC6843595
- DOI: 10.3390/mi10100652
Assessment of Stickiness with Pressure Distribution Sensor Using Offset Magnetic Force
Abstract
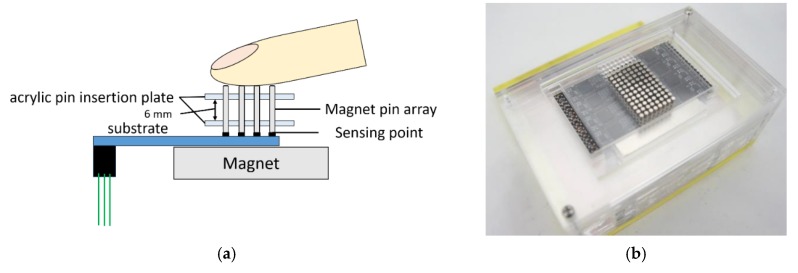
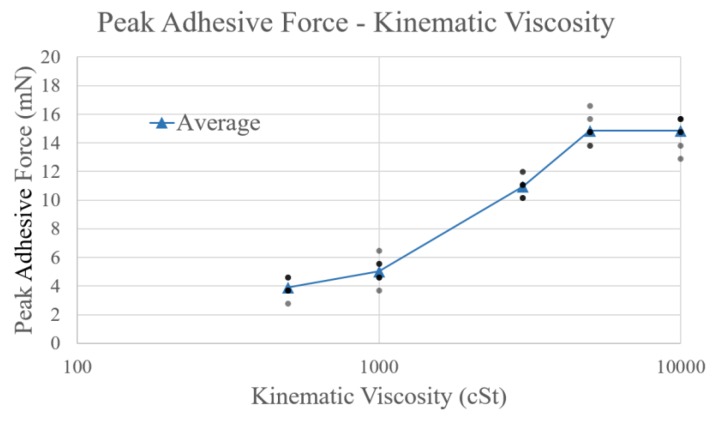
The quantification of stickiness experienced upon touching a sticky or adhesive substance has attracted intense research attention, particularly for application to haptics, virtual reality, and human-computer interactions. Here, we develop and evaluate a device that quantifies the feeling of stickiness experienced upon touching an adhesive substance. Keeping in mind that a typical pressure distribution sensor can only measure a pressing force, but not a tensile force, in our setup, we apply an offset pressure to a pressure distribution sensor and measure the tensile force generated by an adhesive substance as the difference from the offset pressure. We propose a method of using a magnetic force to generate the offset pressure and develop a measuring device using a magnet that attracts magnetic pin arrays and pin magnets; the feasibility of the method is verified with a first prototype. We develop a second prototype that overcomes the noise problems of the first, arising from the misalignment of the pins owing to the bending of the magnetic force lines at the sensor edges. We also obtain measurement results for actual samples and standard viscosity liquids. Our findings indicate the feasibility of our setup as a suitable device for measuring stickiness.
Keywords: haptics; measurement techniques; stickiness; sticky feeling.
Conflict of interest statement
The authors declare no conflict of interest.
Figures















References
-
- Hayward V., Levesque V. Experimental evidence of lateral skin strain during tactile exploration; Proceedings of the Eurohaptics; Dublin, Ireland. 6–9 July 2003.
-
- Bicchi A., Scilingo E.P., and De Rossi D. Haptic discrimination of softness in teleoperation: the role of the contact area spread rate. IEEE Trans. Rob. Autom. 2000;16:496–504. doi: 10.1109/70.880800. - DOI
-
- Kimura F., Yamamoto A., Higuchi T. Development of a contact width sensor for tactile tele-presentation of softness; Proceedings of the 18th IEEE International Symposium on Robot and Human Interactive Communication; Toyama, Japan. 27 September–2 October 2009; pp. 34–39.
-
- Levesque V., Jerome P., Hayward V. Braille Display by Lateral Skin Deformation with the STReSS2 Tactile Transducer; Proceedings of the Second Joint EuroHaptics Conference and Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems (WHC’07); sukaba, Japan. 22–24 March 2007; pp. 115–120.
Grants and funding
LinkOut - more resources
Full Text Sources
