

A multifunctional shape-morphing elastomer with liquid metal inclusions
- PMID: 31591232
- PMCID: PMC6815160
- DOI: 10.1073/pnas.1911021116
A multifunctional shape-morphing elastomer with liquid metal inclusions
Abstract
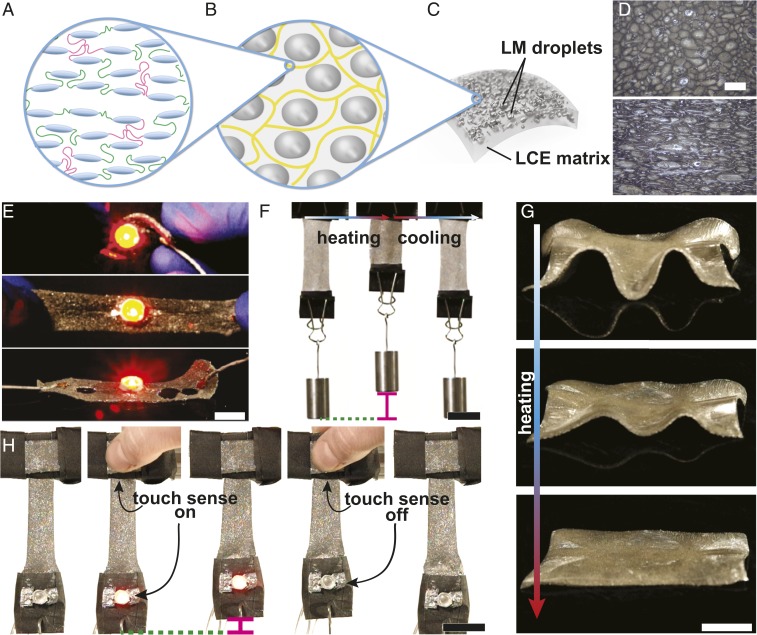
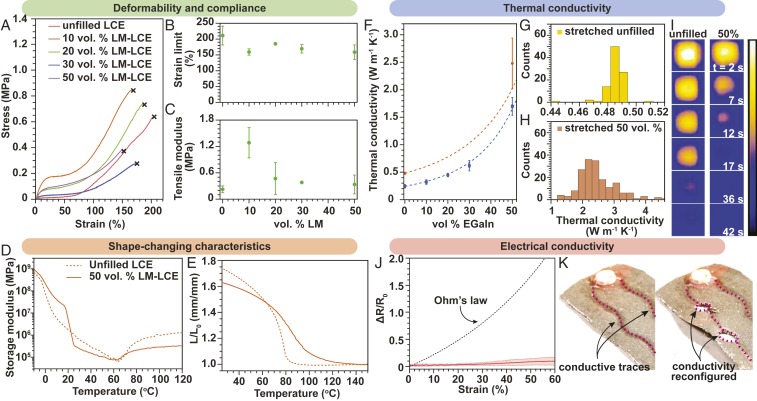
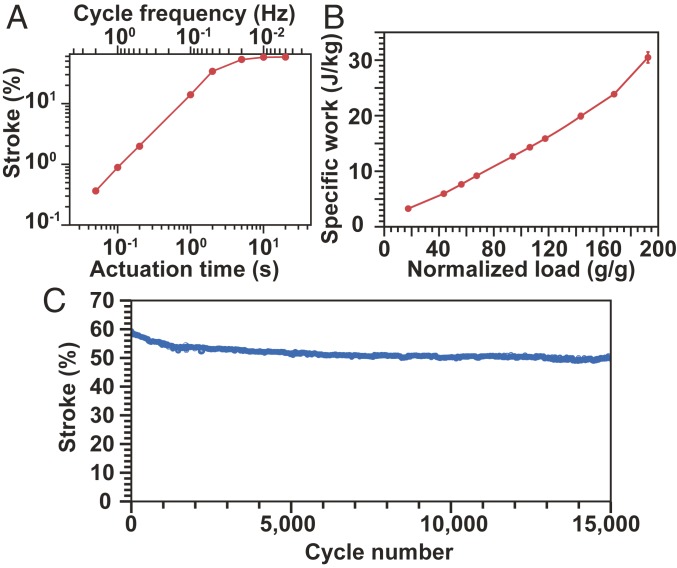
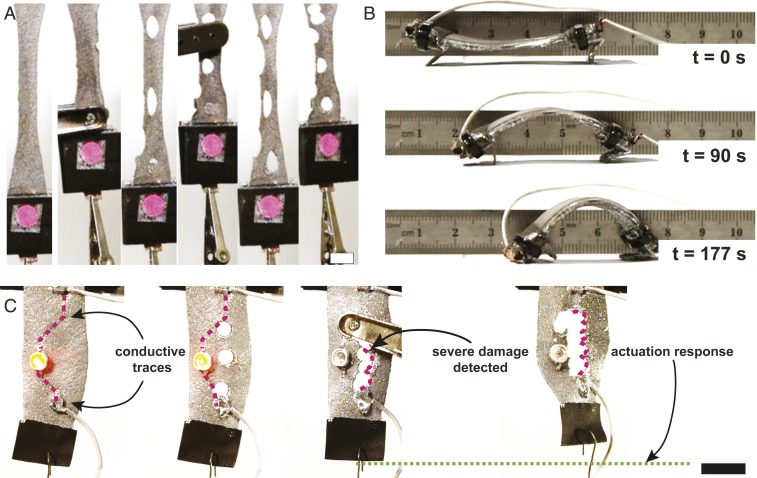
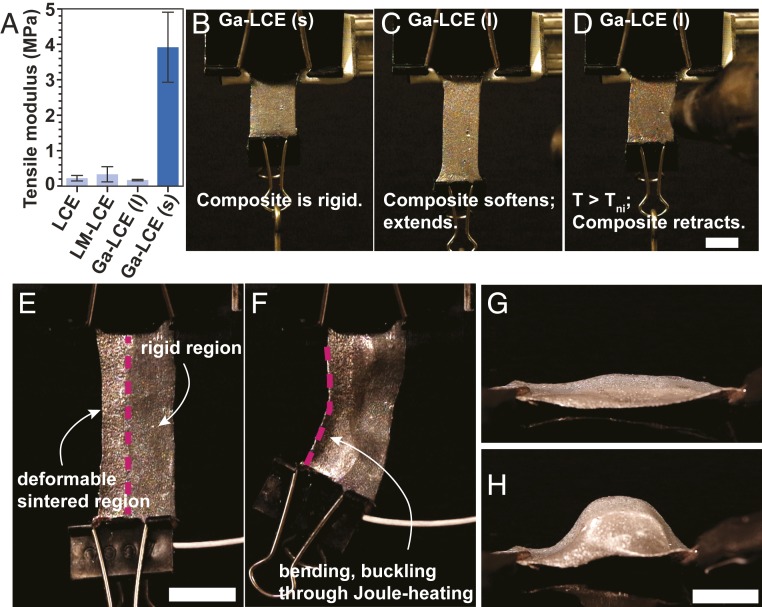
Natural soft tissue achieves a rich variety of functionality through a hierarchy of molecular, microscale, and mesoscale structures and ordering. Inspired by such architectures, we introduce a soft, multifunctional composite capable of a unique combination of sensing, mechanically robust electronic connectivity, and active shape morphing. The material is composed of a compliant and deformable liquid crystal elastomer (LCE) matrix that can achieve macroscopic shape change through a liquid crystal phase transition. The matrix is dispersed with liquid metal (LM) microparticles that are used to tailor the thermal and electrical conductivity of the LCE without detrimentally altering its mechanical or shape-morphing properties. Demonstrations of this composite for sensing, actuation, circuitry, and soft robot locomotion suggest the potential for versatile, tissue-like multifunctionality.
Keywords: conductive elastomer; liquid crystal elastomer; liquid metal; shape memory; soft actuator.
Conflict of interest statement
The authors declare no competing interest.
Figures
References
-
- White T. J., Broer D. J., Programmable and adaptive mechanics with liquid crystal polymer networks and elastomers. Nat. Mater. 14, 1087–1098 (2015). - PubMed
-
- Rich S. I., Wood R. J., Majidi C., Untethered soft robotics. Nat. Electron. 1, 102–112 (2018).
-
- Yang C., Suo Z., Hydrogel ionotronics. Nat. Rev. Mater. 3, 125–142 (2018).
-
- Liu Y., Pharr M., Salvatore G. A., Lab-on-skin: A review of flexible and stretchable electronics for wearable health monitoring. ACS Nano 11, 9614–9635 (2017). - PubMed
-
- Behl M., Razzaq M. Y., Lendlein A., Multifunctional shape-memory polymers. Adv. Mater. 22, 3388–3410 (2010). - PubMed
Publication types
LinkOut - more resources
Full Text Sources
Other Literature Sources
