

Experimental Assessment of the Interface Electronic System for PVDF-Based Piezoelectric Tactile Sensors
- PMID: 31614960
- PMCID: PMC6832555
- DOI: 10.3390/s19204437
Experimental Assessment of the Interface Electronic System for PVDF-Based Piezoelectric Tactile Sensors
Abstract
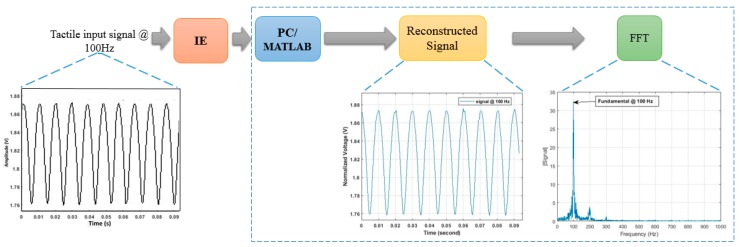
Tactile sensors are widely employed to enable the sense of touch for applications such as robotics and prosthetics. In addition to the selection of an appropriate sensing material, the performance of the tactile sensing system is conditioned by its interface electronic system. On the other hand, due to the need to embed the tactile sensing system into a prosthetic device, strict requirements such as small size and low power consumption are imposed on the system design. This paper presents the experimental assessment and characterization of an interface electronic system for piezoelectric tactile sensors for prosthetic applications. The interface electronic is proposed as part of a wearable system intended to be integrated into an upper limb prosthetic device. The system is based on a low power arm-microcontroller and a DDC232 device. Electrical and electromechanical setups have been implemented to assess the response of the interface electronic with PVDF-based piezoelectric sensors. The results of electrical and electromechanical tests validate the correct functionality of the proposed system.
Keywords: experimental characterization; interface electronics; sensors measurements; signal to noise ratio; tactile sensors.
Conflict of interest statement
The authors declare no conflict of interest.
Figures











References
-
- Fares H., Seminara L., Pinna L., Valle M., Groten J., Hammer M., Zirkl M., Sadlober B. Screen Printed Tactile Sensing Arrays for Prosthetic Applications; Proceedings of the International Symposium on Circuits and Systems; Florence, Italy. 27–30 May 2018; pp. 1–4.
-
- Charalambides A., Bergbreiter S. A novel all-elastomer MEMS tactile sensor for high dynamic range shear and normal force sensing. J. Micromech. Microeng. 2015;25:9. doi: 10.1088/0960-1317/25/9/095009. - DOI
-
- Choi B., Choi H.R., Kang S. Development of tactile sensor for detecting contact force and slip; Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems; Edmonton, AB, Canada. 2–6 August 2005; pp. 2638–2643.
-
- Dahiya R.S., Adami A., Collini C., Valle M., Lorenzelli L. POSFET Tactile Sensing Chips Using CMOS Technology; Proceedings of the 2013 IEEE SENSORS; Baltimore, MD, USA. 3–6 November 2013; pp. 2–6.
-
- Ibrahim A., Valle M. Real-Time Embedded Machine Learning for Tensorial Tactile Data Processing. IEEE Trans. Circuits Syst. I. Regul. Pap. 2018;65:3897–3906. doi: 10.1109/TCSI.2018.2852260. - DOI
LinkOut - more resources
Full Text Sources
