

Performance Evaluation of Multi-UAV Network Applied to Scanning Rocket Impact Area
- PMID: 31717563
- PMCID: PMC6891732
- DOI: 10.3390/s19224895
Performance Evaluation of Multi-UAV Network Applied to Scanning Rocket Impact Area
Abstract
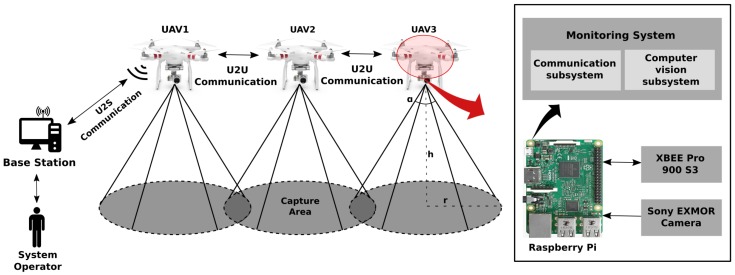
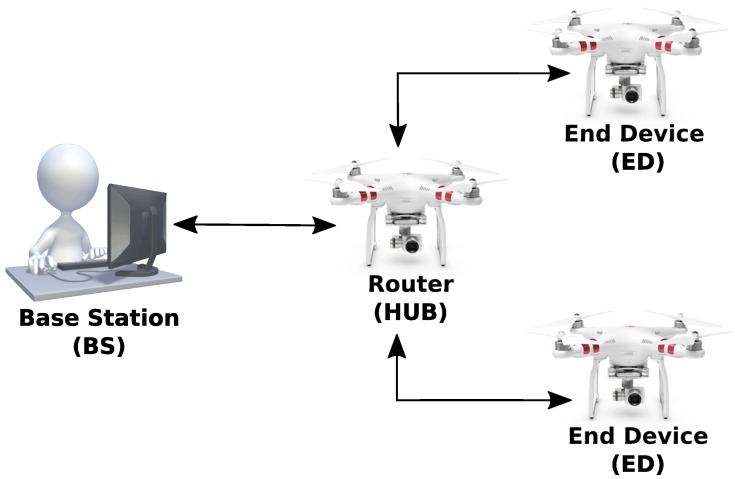
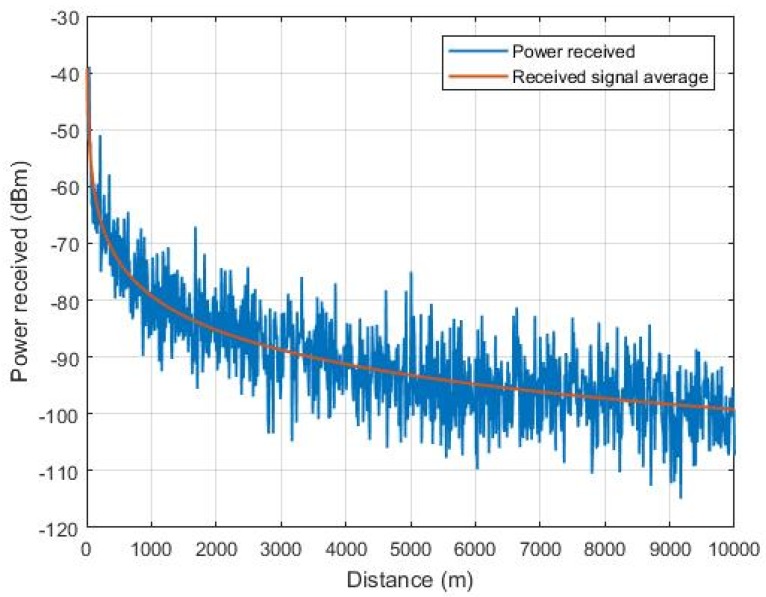
This paper presents a communication network for a squadron of unmanned aerial vehicles (UAVs) to be used in the scanning rocket impact area for Barreira do Inferno Launch Center-CLBI (Rio Grande do Norte, Brazil), aiming at detecting intruder boats. The main features of communication networks associated with multi-UAV systems are presented. This system sends information through Wireless Sensor Networks (WSN). After comparing and analyzing area scanning strategies, it presents the specification of a data communication network architecture for a squadron of UAVs within a sensor network using XBee Pro 900HP S3B modules. A brief description is made about the initial information from the construction of the system. The embedded hardware and the design procedure of a dedicated communication antenna to the XBee modules are presented. In order to evaluate the performance of the proposed architecture in terms of robustness and reliability, a set of experimental tests in different communication scenarios is carried out. Network management software is employed to measure the throughput, packet loss and other performance indicators in the communication links between the different network nodes. Experimental results allow verifying the quality and performance of the network nodes, as well as the reliability of the communication links, assessing signal received quality, range and latency.
Keywords: FANET; ad hoc network; communication architecture; multi-UAV system monitoring; network performance; wireless sensor networks.
Conflict of interest statement
The authors declare no conflict of interest.
Figures














References
-
- Wallace L., Lucieer A., Watson C., Turner D. Development of a UAV-LiDAR system with application to forest inventory. Remote Sens. 2012;4:1519–1543. doi: 10.3390/rs4061519. - DOI
-
- Hernández-Vega J.I., Varela E.R., Romero N.H., Hernández-Santos C., Cuevas J.L.S., Gorham D.G.P. Smart Technology. Springer; Berlin/Heidelberg, Germany: 2018. Internet of Things (IoT) for Monitoring Air Pollutants with an Unmanned Aerial Vehicle (UAV) in a Smart City; pp. 108–120.
-
- Sun P., Boukerche A., Tao Y. Theoretical Analysis of the Area Coverage in a UAV-based Wireless Sensor Network; Proceedings of the 13th International Conference on Distributed Computing in Sensor Systems (DCOSS); Ottawa, ON, Canada. 5–7 June 2017; pp. 117–120.
-
- Papatheodorou S., Tzes A., Stergiopoulos Y. Collaborative visual area coverage. Robot. Auton. Syst. 2017;92:126–138. doi: 10.1016/j.robot.2017.03.005. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
