

Flexible control of movement in plants
- PMID: 31719580
- PMCID: PMC6851115
- DOI: 10.1038/s41598-019-53118-0
Flexible control of movement in plants
Abstract
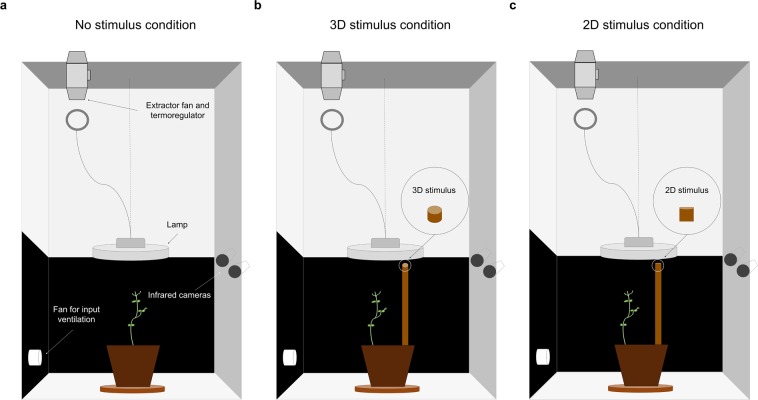
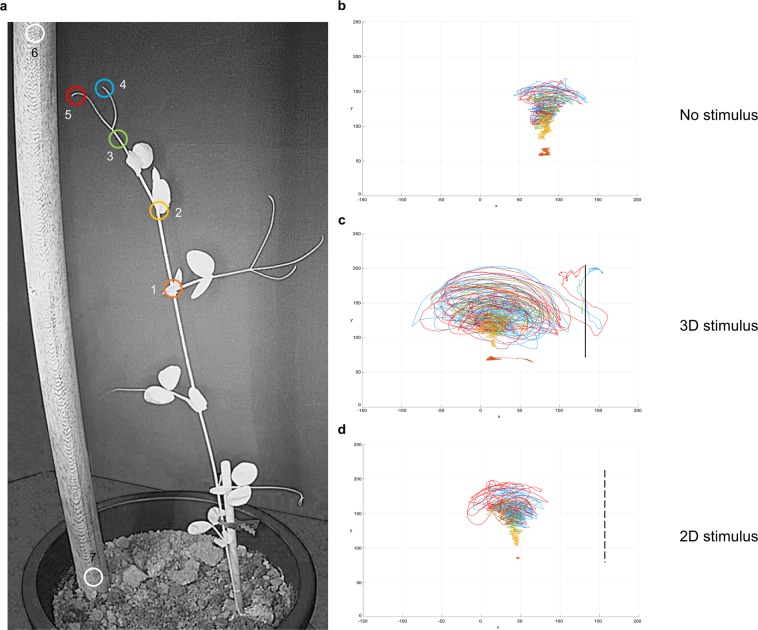
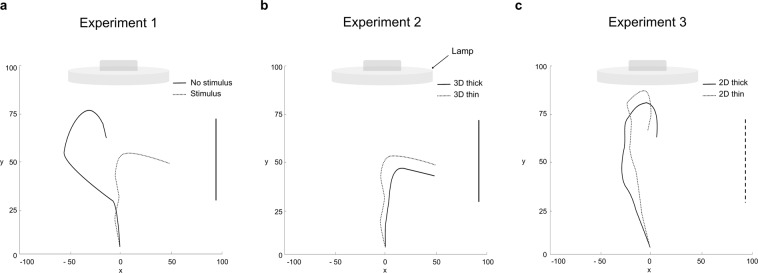
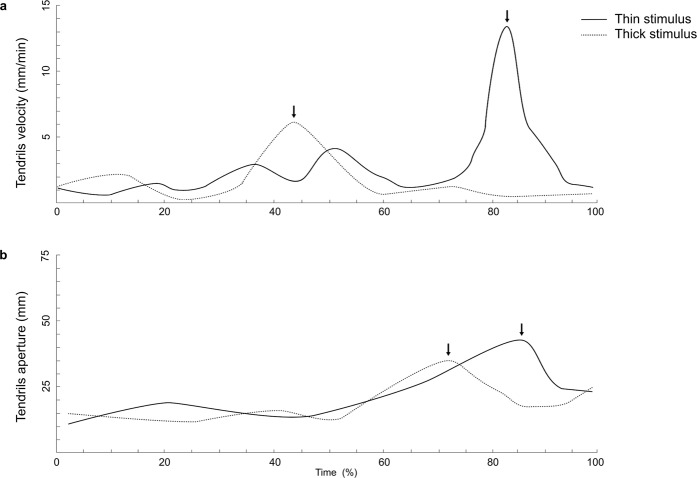
Although plants are essentially sessile in nature, these organisms are very much in tune with their environment and are capable of a variety of movements. This may come as a surprise to many non-botanists, but not to Charles Darwin, who reported that plants do produce movements. Following Darwin's specific interest on climbing plants, this paper will focus on the attachment mechanisms by the tendrils. We draw attention to an unsolved problem in available literature: whether during the approach phase the tendrils of climbing plants consider the structure of the support they intend to grasp and plan the movement accordingly ahead of time. Here we report the first empirical evidence that this might be the case. The three-dimensional (3D) kinematic analysis of a climbing plant (Pisum sativum L.) demonstrates that the plant not only perceives the support, but it scales the kinematics of tendrils' aperture according to its thickness. When the same support is represented in two-dimensions (2D), and thus unclimbable, there is no evidence for such scaling. In these circumstances the tendrils' kinematics resemble those observed for the condition in which no support was offered. We discuss these data in light of the evidence suggesting that plants are equipped with sensory mechanisms able to provide the necessary information to plan and control a movement.
Conflict of interest statement
The authors declare no competing interests.
Figures
References
-
- Darwin, C. & Darwin, F. The power of movement in plants (John Murray, London, 1880).
-
- Darwin, C. The movements and habits of climbing plants (John Murray, London, 1875).
-
- Baillaud L. Les mouvements d’exploration et d’enroulement des plantes volubiles. Handbuch der Pflanzenphysiologie. 1962;17:635–715.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
