

Social behavior for autonomous vehicles
- PMID: 31757853
- PMCID: PMC6911195
- DOI: 10.1073/pnas.1820676116
Social behavior for autonomous vehicles
Abstract
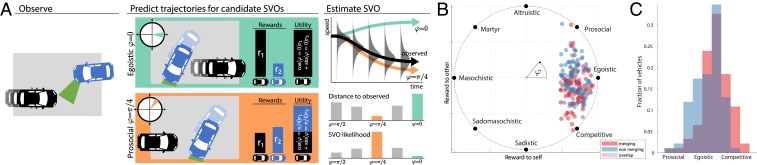
Deployment of autonomous vehicles on public roads promises increased efficiency and safety. It requires understanding the intent of human drivers and adapting to their driving styles. Autonomous vehicles must also behave in safe and predictable ways without requiring explicit communication. We integrate tools from social psychology into autonomous-vehicle decision making to quantify and predict the social behavior of other drivers and to behave in a socially compliant way. A key component is Social Value Orientation (SVO), which quantifies the degree of an agent's selfishness or altruism, allowing us to better predict how the agent will interact and cooperate with others. We model interactions between agents as a best-response game wherein each agent negotiates to maximize their own utility. We solve the dynamic game by finding the Nash equilibrium, yielding an online method of predicting multiagent interactions given their SVOs. This approach allows autonomous vehicles to observe human drivers, estimate their SVOs, and generate an autonomous control policy in real time. We demonstrate the capabilities and performance of our algorithm in challenging traffic scenarios: merging lanes and unprotected left turns. We validate our results in simulation and on human driving data from the NGSIM dataset. Our results illustrate how the algorithm's behavior adapts to social preferences of other drivers. By incorporating SVO, we improve autonomous performance and reduce errors in human trajectory predictions by 25%.
Keywords: Social Value Orientation; autonomous driving; game theory; inverse reinforcement learning; social compliance.
Copyright © 2019 the Author(s). Published by PNAS.
Conflict of interest statement
Competing interest statement: W.S., A.P., J.A.-M., S.K., and D.R. are inventors on a provisional patent disclosure (filed by Massachusetts Institute of Technology) related to the social behavior for autonomous vehicles and uses thereof.
Figures



References
-
- National Highway Traffic Safety Administration , “Traffic Safety Facts 2015” (Tech. Rep. DOT HS 812 318, National Highway Traffic Safety Administration, Washington, DC, 2015), p. 101.
-
- Efrati A., Waymo‘s big ambitions slowed by tech trouble. The Information (2018). https://www.theinformation.com/articles/waymos-big-ambitions-slowed-by-t....
-
- Stewart J., Why people keep rear-ending self-driving cars. Wired (2018) https://www.wired.com/story/self-driving-car-crashes-rear-endings-why-ch....
-
- Urmson C., et al. , Autonomous driving in urban environments: Boss and the urban challenge. J. Field Robot. 25, 425–466 (2008).
-
- Leonard J., et al. , A perception-driven autonomous urban vehicle. J. Field Robot. 25, 727–774 (2008).
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
