

Unsupervised identification of the internal states that shape natural behavior
- PMID: 31768056
- PMCID: PMC7819718
- DOI: 10.1038/s41593-019-0533-x
Unsupervised identification of the internal states that shape natural behavior
Erratum in
-
Author Correction: Unsupervised identification of the internal states that shape natural behavior.Nat Neurosci. 2020 Feb;23(2):293. doi: 10.1038/s41593-019-0571-4. Nat Neurosci. 2020. PMID: 31857711
Abstract
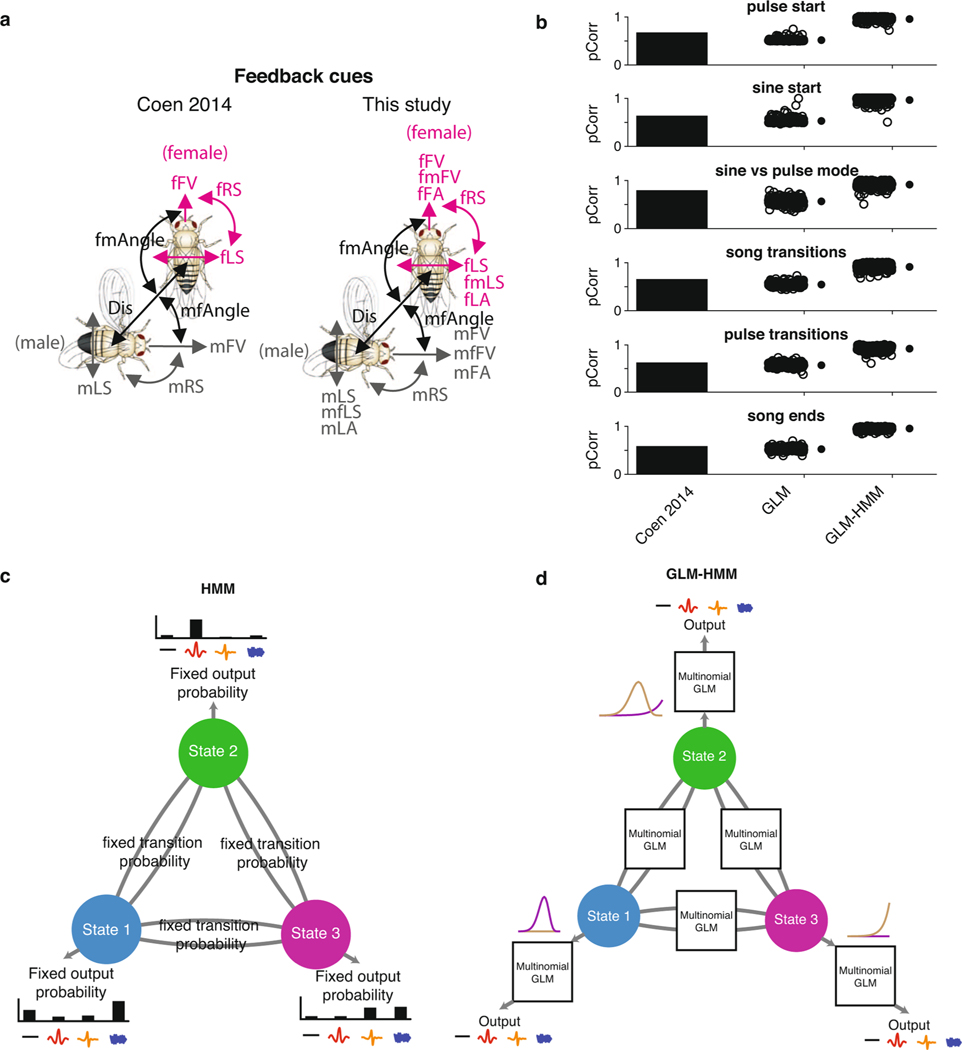
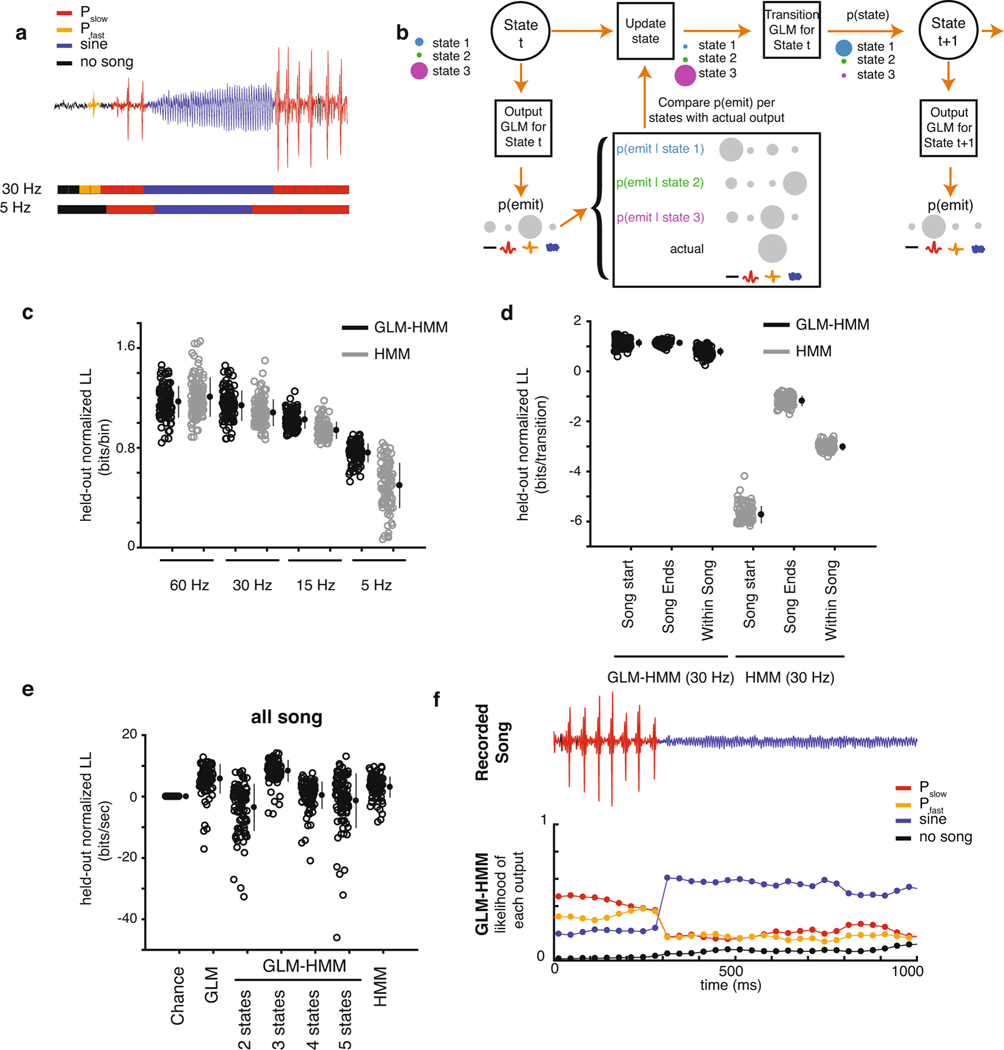
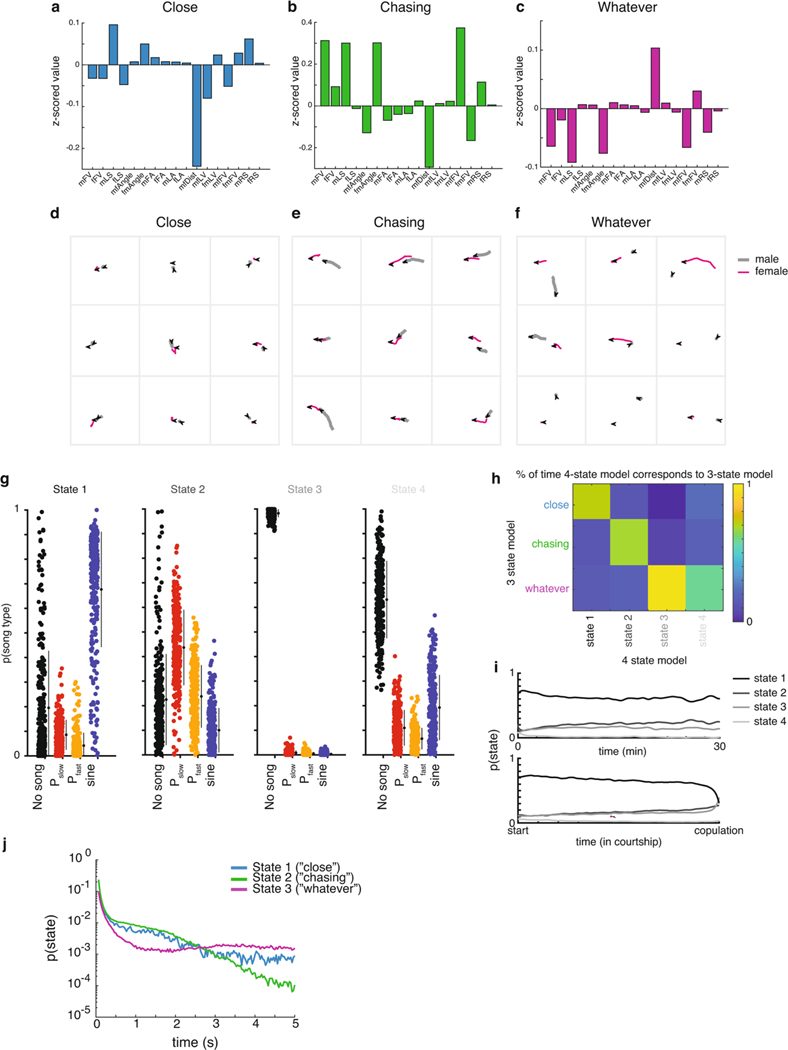
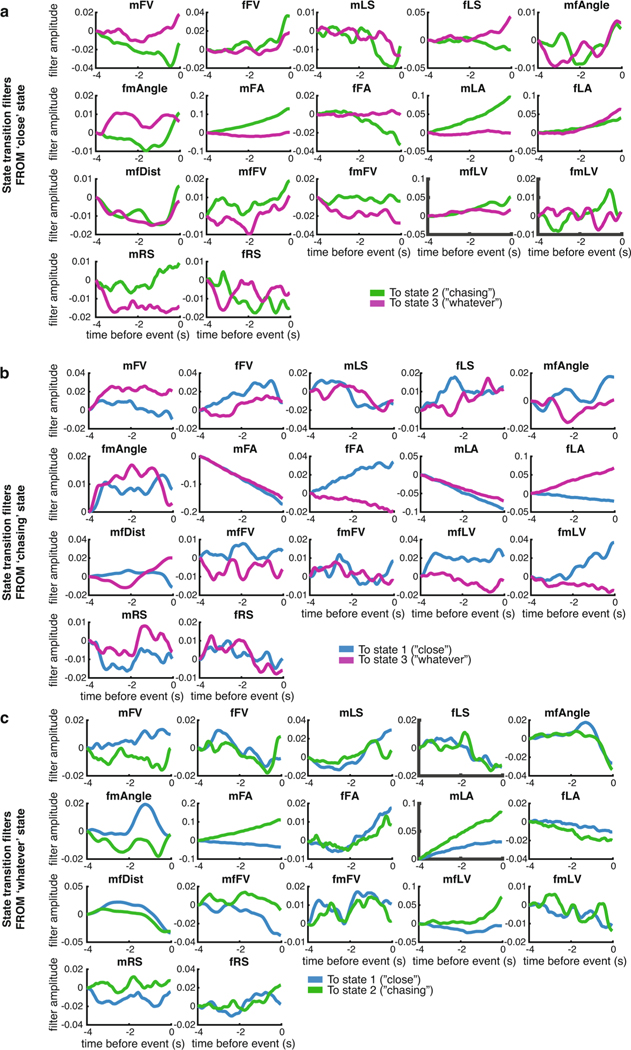
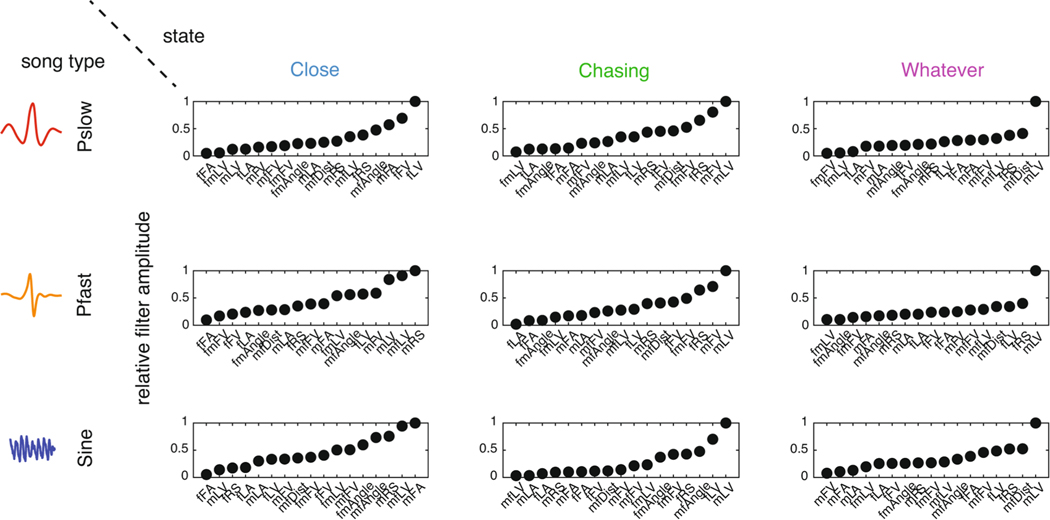
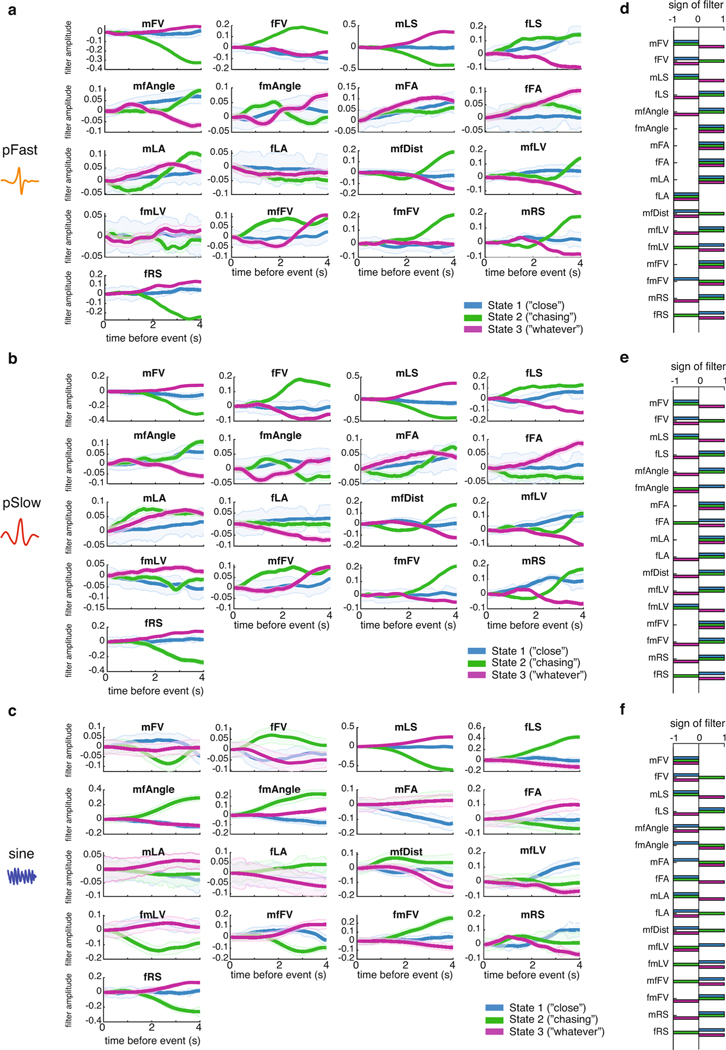
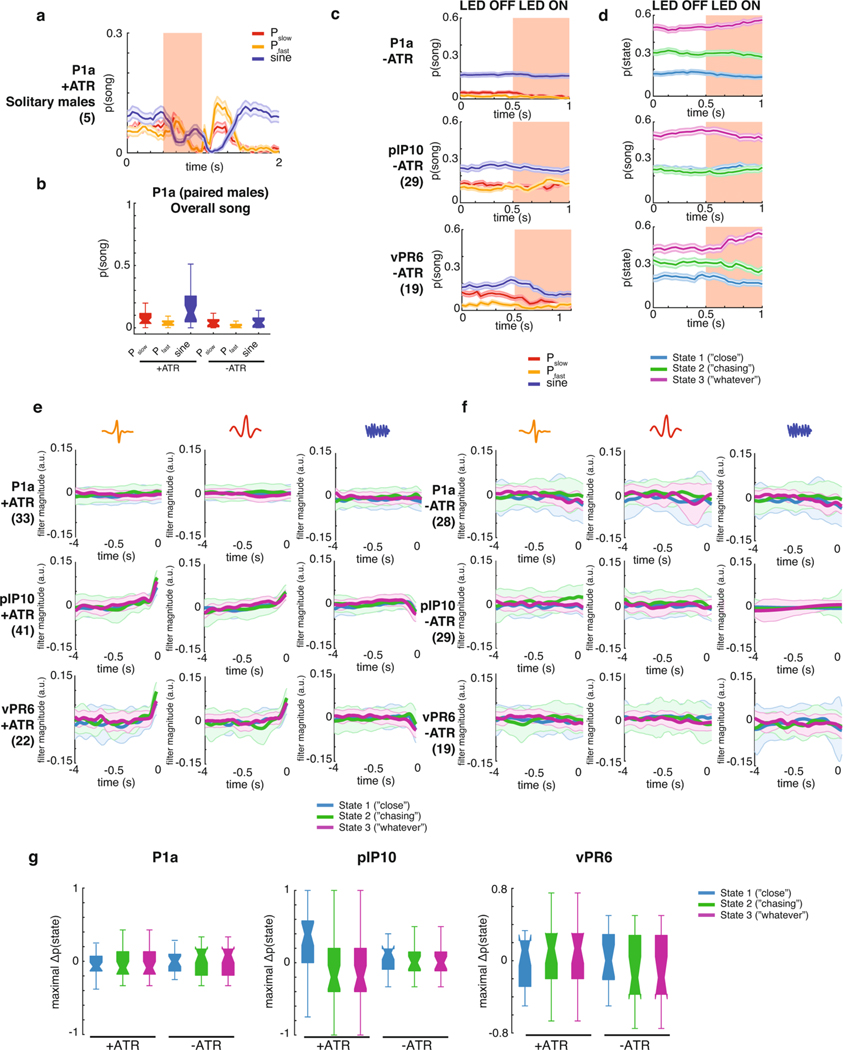
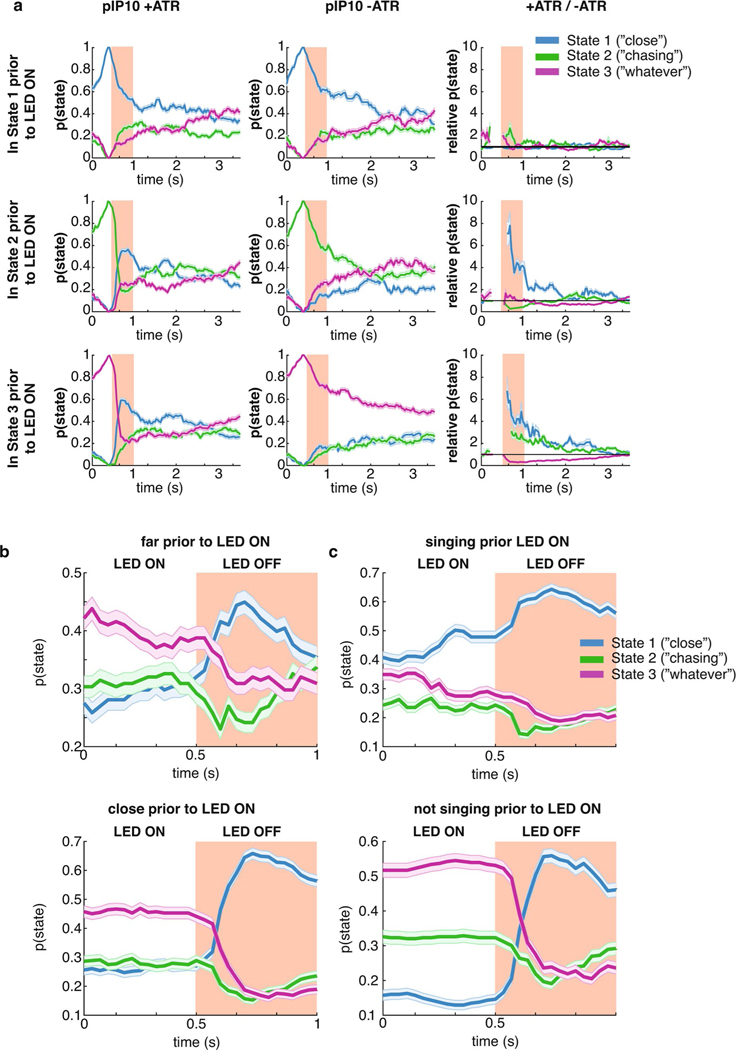
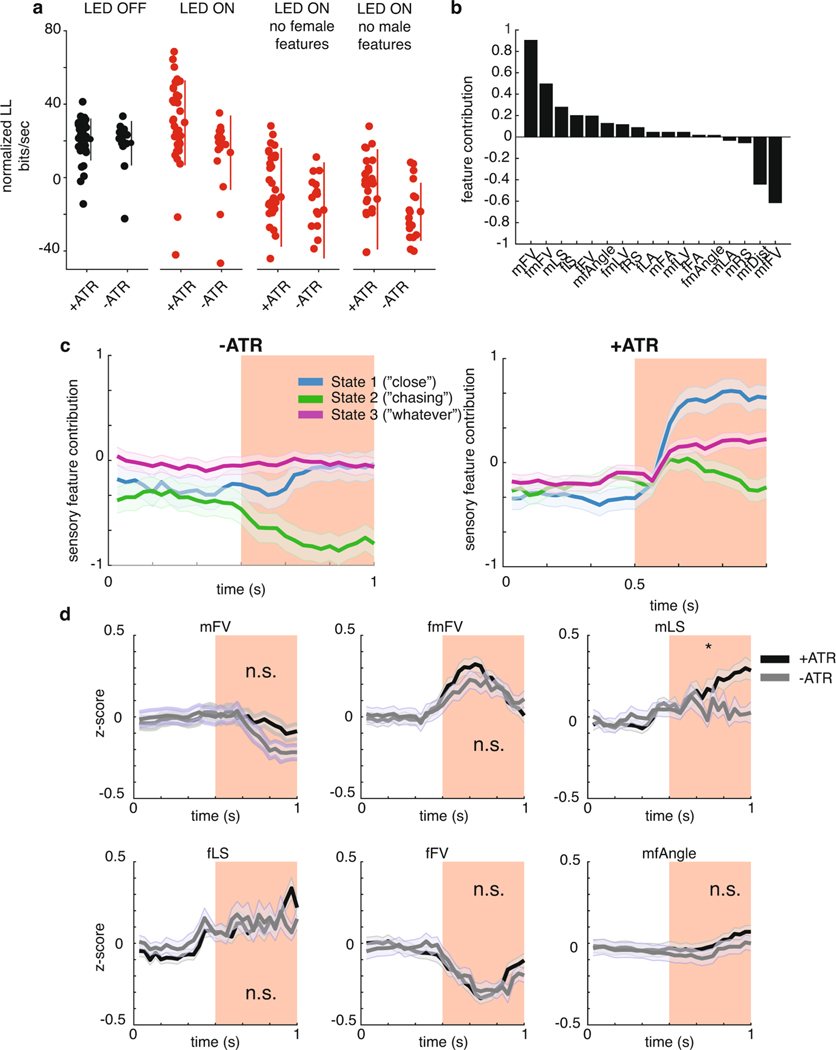
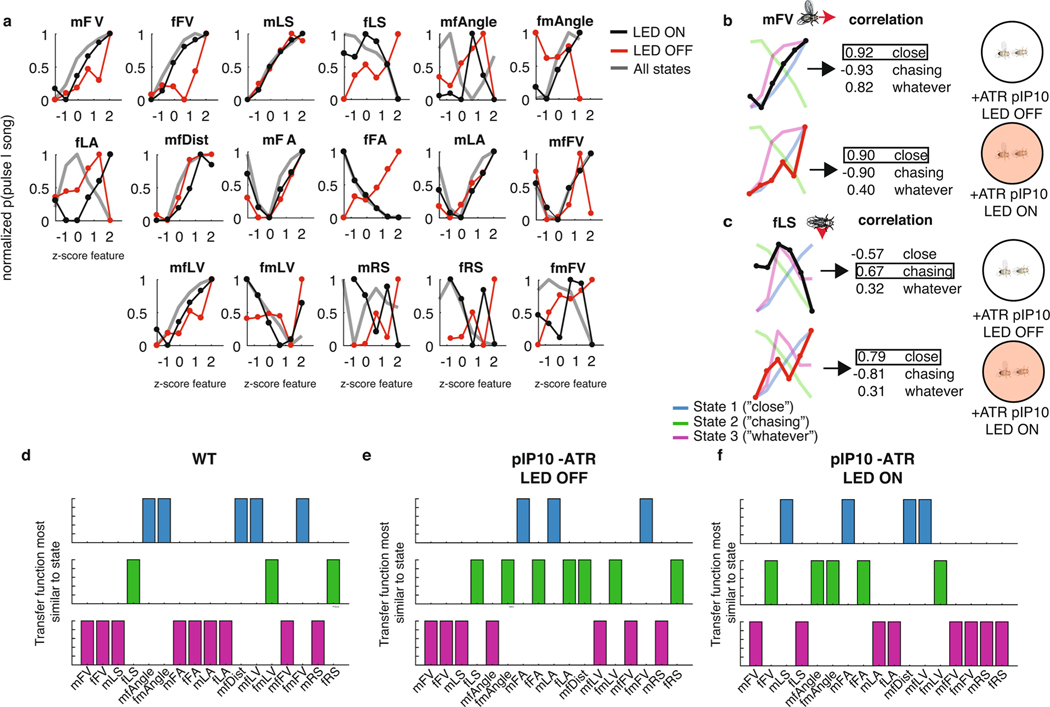
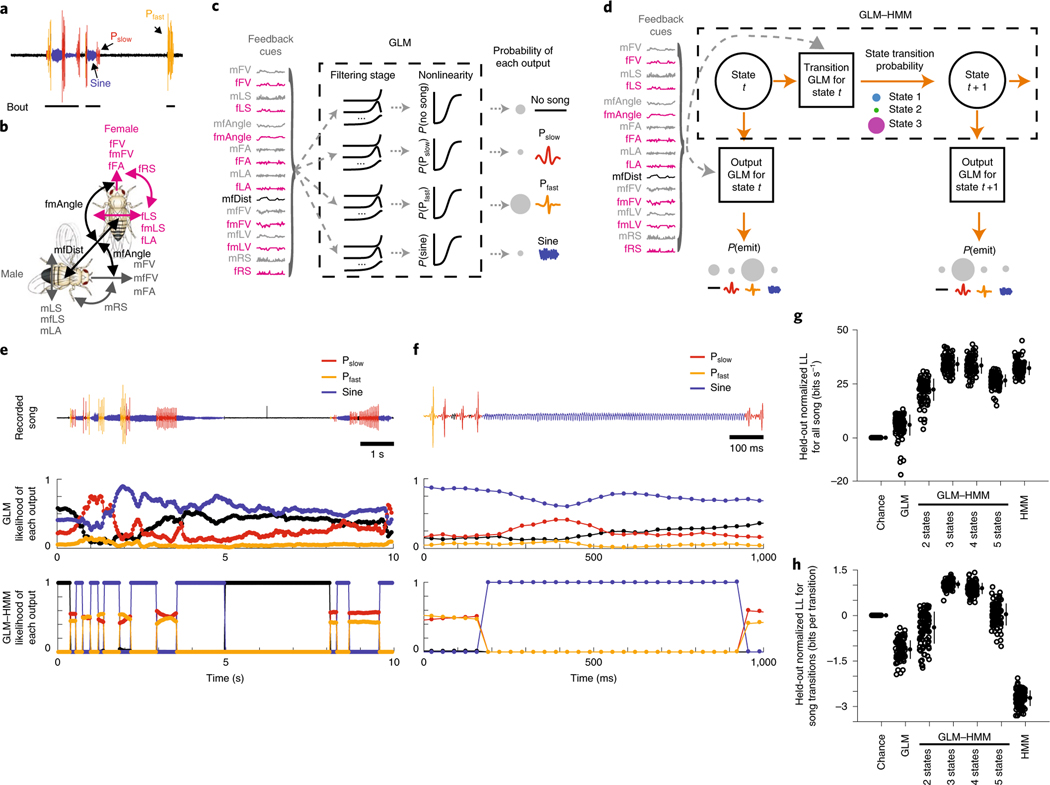
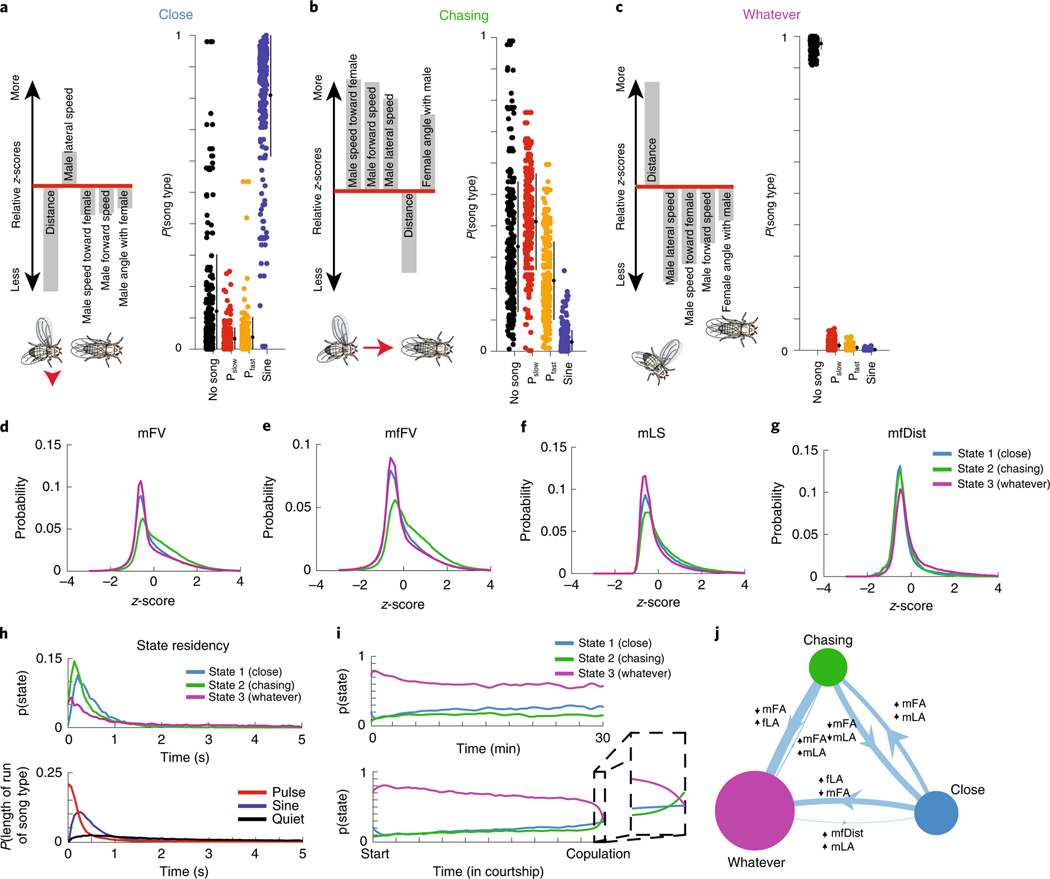
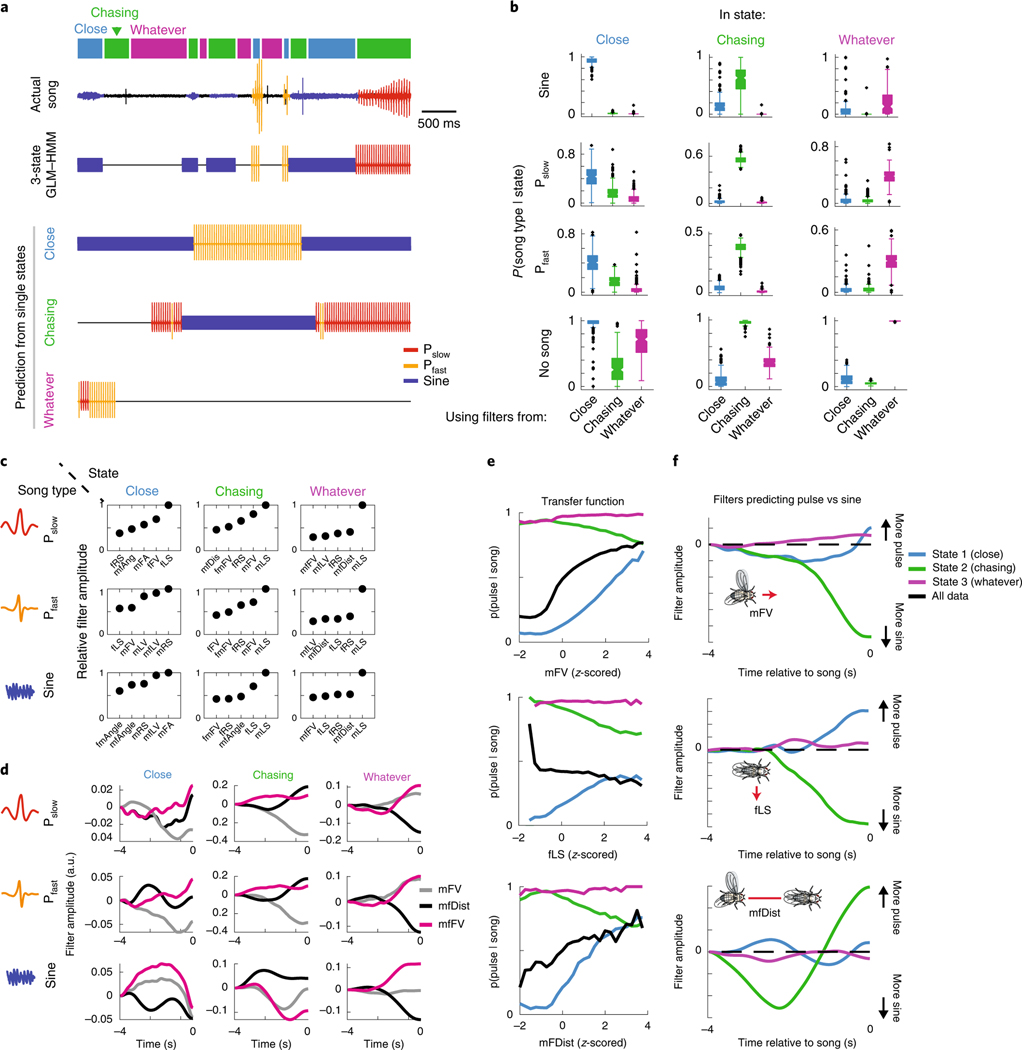
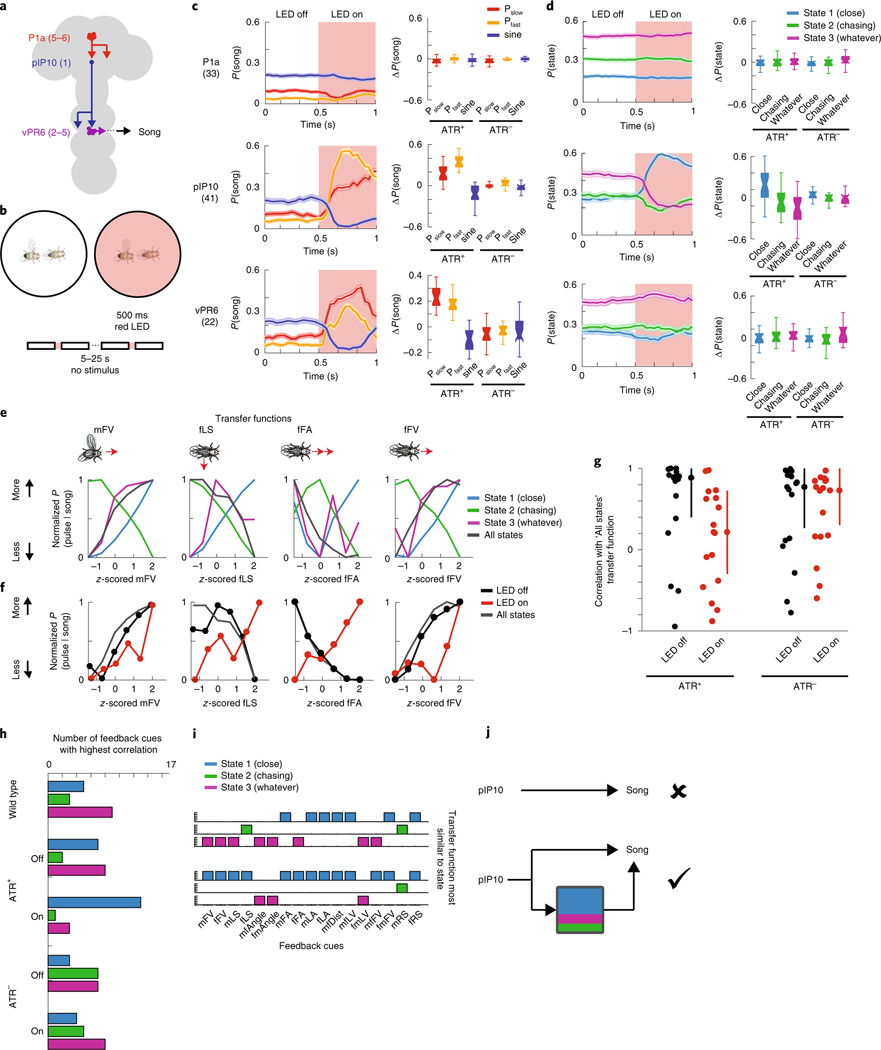
Internal states shape stimulus responses and decision-making, but we lack methods to identify them. To address this gap, we developed an unsupervised method to identify internal states from behavioral data and applied it to a dynamic social interaction. During courtship, Drosophila melanogaster males pattern their songs using feedback cues from their partner. Our model uncovers three latent states underlying this behavior and is able to predict moment-to-moment variation in song-patterning decisions. These states correspond to different sensorimotor strategies, each of which is characterized by different mappings from feedback cues to song modes. We show that a pair of neurons previously thought to be command neurons for song production are sufficient to drive switching between states. Our results reveal how animals compose behavior from previously unidentified internal states, which is a necessary step for quantitative descriptions of animal behavior that link environmental cues, internal needs, neuronal activity and motor outputs.
Conflict of interest statement
Competing interests
The authors declare no competing interests.
Figures
Comment in
-
Opening the black box of social behavior.Nat Neurosci. 2019 Dec;22(12):1947-1948. doi: 10.1038/s41593-019-0547-4. Nat Neurosci. 2019. PMID: 31768055 No abstract available.
References
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Molecular Biology Databases
Miscellaneous
