

An Approach to Segment and Track-Based Pedestrian Detection from Four-Layer Laser Scanner Data
- PMID: 31835659
- PMCID: PMC6960915
- DOI: 10.3390/s19245450
An Approach to Segment and Track-Based Pedestrian Detection from Four-Layer Laser Scanner Data
Abstract
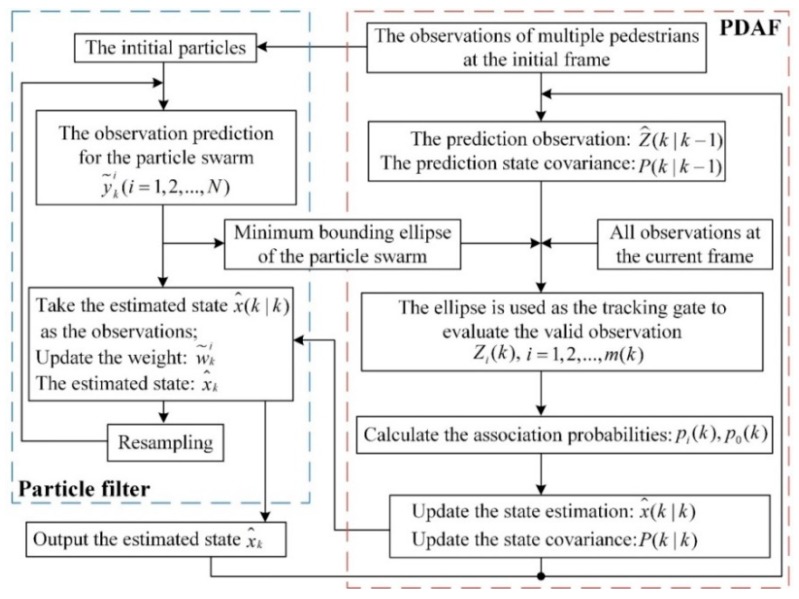
Pedestrian detection is a critical perception task for autonomous driving and intelligent vehicle, and it is challenging due to the potential variation of appearance and pose of human beings as well as the partial occlusion. In this paper, we present a novel pedestrian detection method via four-layer laser scanner. The proposed approach deals with the occlusion problem by fusing the segment classification results with past knowledge integration from tracking process. First, raw point cloud is segmented into the clusters of independent objects. Then, three types of features are proposed to capture the comprehensive cues, and 18 effective features are extracted with the combination of the univariate feature selection algorithm and feature correlation analysis process. Next, based on the segment classification at individual frame, the track classification is conducted further for consecutive frames using particle filter and probability data association filter. Experimental results demonstrate that both back-propagation neural network and Adaboost classifiers based on 18 selected features have their own advantages at the segment classification stage in terms of pedestrian detection performance and computation time, and the track classification procedure can improve the detection performance particularly for partially occluded pedestrians in comparison with the single segment classification procedure.
Keywords: feature correlation analysis; laser scanner; pedestrian detection; probability data association filter; track classification.
Conflict of interest statement
The authors declare that they have no competing interest.
Figures













References
-
- Gong Z., Lin H., Zhang D., Luo Z., Zelek J., Chen Y., Wang C., Li J. A Frustum-Based Probabilistic Framework for 3D Object Detection by Fusion of LiDAR and Camera. ISPRS J. Photogramm. Remote Sens. 2020;159:90–100. doi: 10.1016/j.isprsjprs.2019.10.015. - DOI
-
- Yan P., Zhuo L., Li J., Zhang H., Zhang J. Pedestrian Attributes Recognition in Surveillance Scenarios Using Multi-Task Lightweight Convolutional Neural Network. Appl. Sci. 2019;9:4182. doi: 10.3390/app9194182. - DOI
-
- Zhang S., Wang C., He Z., Li Q., Lin X., Zhang J., Yang C., Li J. Vehicle Global 6-DoF Pose Estimation Under Traffic Surveillance Camera. ISPRS J. Photogramm. Remote Sens. 2020;159:114–128. doi: 10.1016/j.isprsjprs.2019.11.005. - DOI
-
- Zhang M., Fu R., Morris D., Wang C. A Framework for Turning Behavior Classification at Intersections Using 3D LIDAR. IEEE Trans. Veh. Technol. 2019;68:7431–7442. doi: 10.1109/TVT.2019.2926787. - DOI
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Miscellaneous
