

Development Trends and Perspectives of Future Sensors and MEMS/NEMS
- PMID: 31861476
- PMCID: PMC7019281
- DOI: 10.3390/mi11010007
Development Trends and Perspectives of Future Sensors and MEMS/NEMS
Abstract
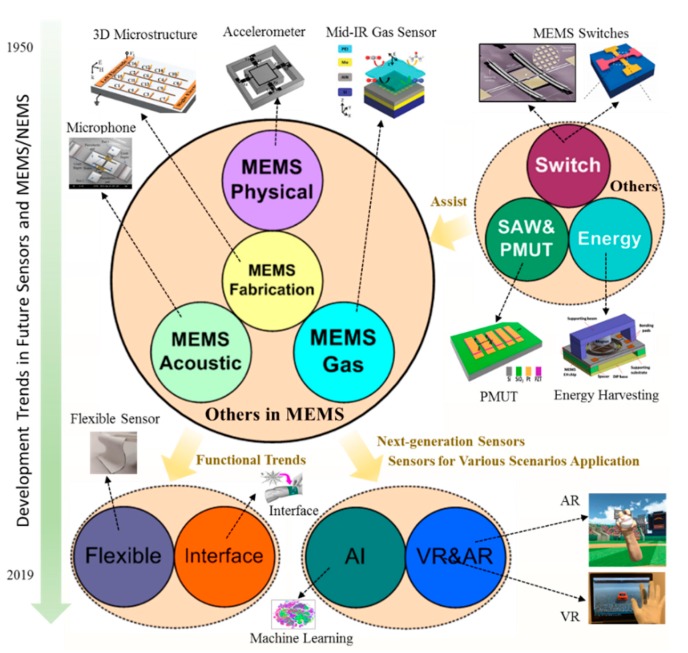
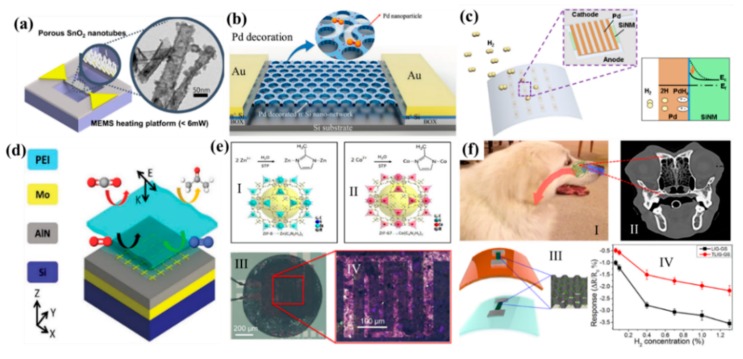
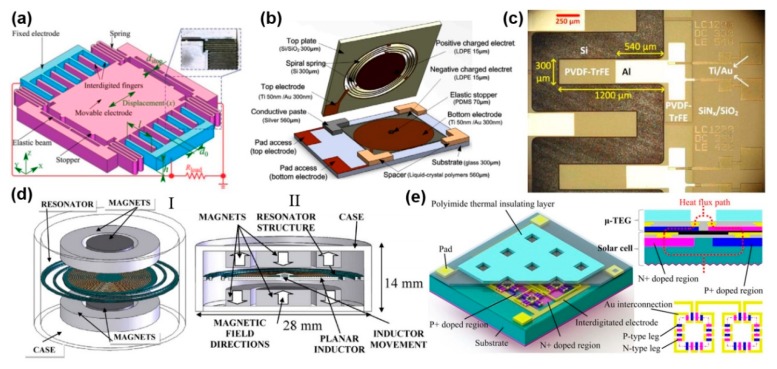
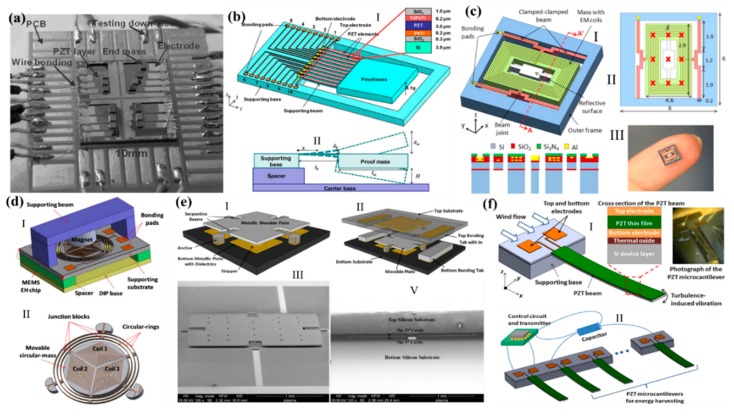
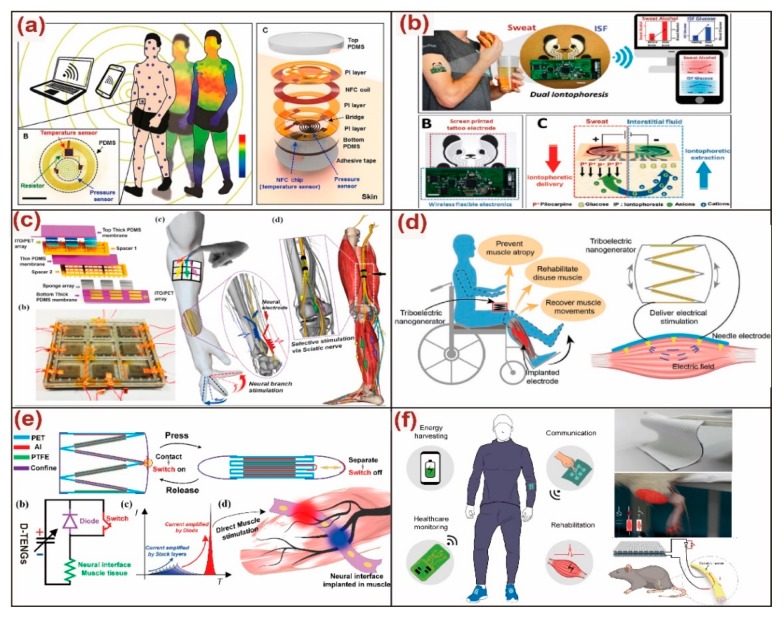
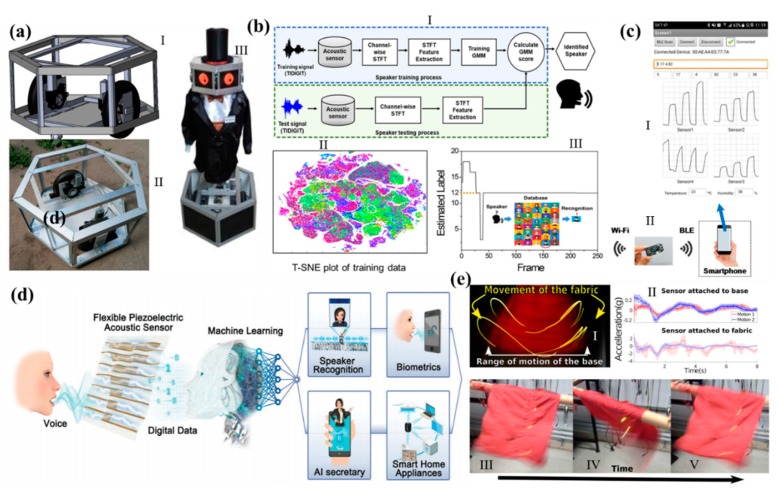
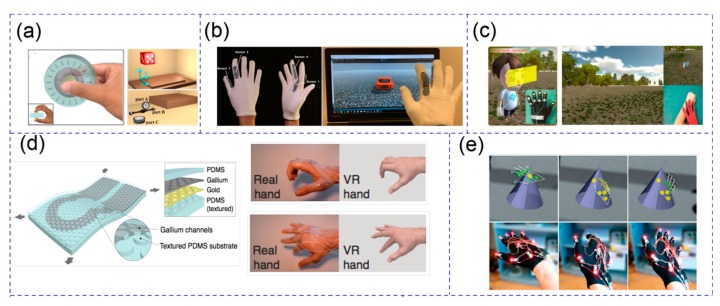
With the fast development of the fifth-generation cellular network technology (5G), the future sensors and microelectromechanical systems (MEMS)/nanoelectromechanical systems (NEMS) are presenting a more and more critical role to provide information in our daily life. This review paper introduces the development trends and perspectives of the future sensors and MEMS/NEMS. Starting from the issues of the MEMS fabrication, we introduced typical MEMS sensors for their applications in the Internet of Things (IoTs), such as MEMS physical sensor, MEMS acoustic sensor, and MEMS gas sensor. Toward the trends in intelligence and less power consumption, MEMS components including MEMS/NEMS switch, piezoelectric micromachined ultrasonic transducer (PMUT), and MEMS energy harvesting were investigated to assist the future sensors, such as event-based or almost zero-power. Furthermore, MEMS rigid substrate toward NEMS flexible-based for flexibility and interface was discussed as another important development trend for next-generation wearable or multi-functional sensors. Around the issues about the big data and human-machine realization for human beings' manipulation, artificial intelligence (AI) and virtual reality (VR) technologies were finally realized using sensor nodes and its wave identification as future trends for various scenarios.
Keywords: MEMS sensor; artificial intelligence; flexible sensor; human-machine interface; machine learning; zero-power sensor.
Conflict of interest statement
The authors declare no conflict of interest.
Figures



References
-
- Lee C., Radhakrishnan R., Chen C.-C., Li J., Thillaigovindan J., Balasubramanian N. Design and modeling of a nanomechanical sensor using silicon photonic crystals. J. Light. Technol. 2008;26:839–846. doi: 10.1109/JLT.2007.915273. - DOI
-
- Lam K., Leo M., Lee C., Liang G. Design evaluation of graphene nanoribbon nanoelectromechanical devices. J. Appl. Phys. 2011;110:024302–024308. doi: 10.1063/1.3606578. - DOI
-
- Koh K., Kobayashi T., Lee C. Investigation of piezoelectric driven MEMS mirrors based on single and double s-shaped PZT actuator for 2-D scanning applications. Sens. Actuators A Phys. 2012;184:149–159. doi: 10.1016/j.sna.2012.06.018. - DOI
Publication types
Grants and funding
LinkOut - more resources
Full Text Sources
