

Real-time cortical simulation on neuromorphic hardware
- PMID: 31865885
- PMCID: PMC6939236
- DOI: 10.1098/rsta.2019.0160
Real-time cortical simulation on neuromorphic hardware
Abstract
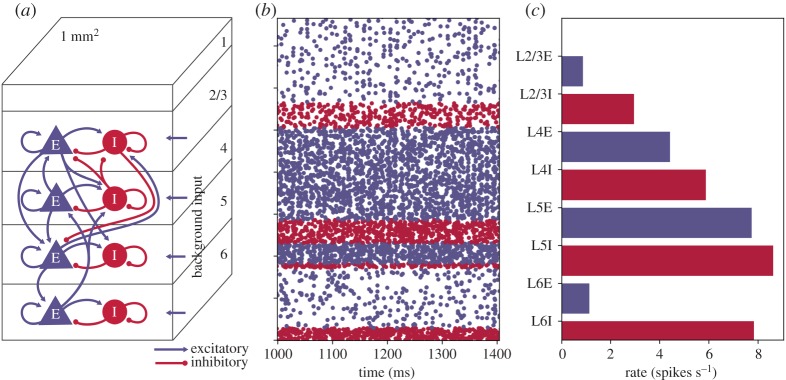
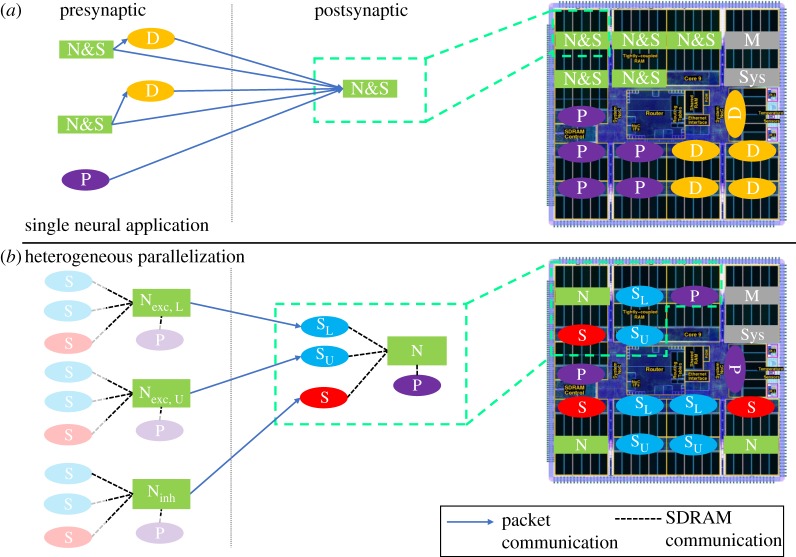
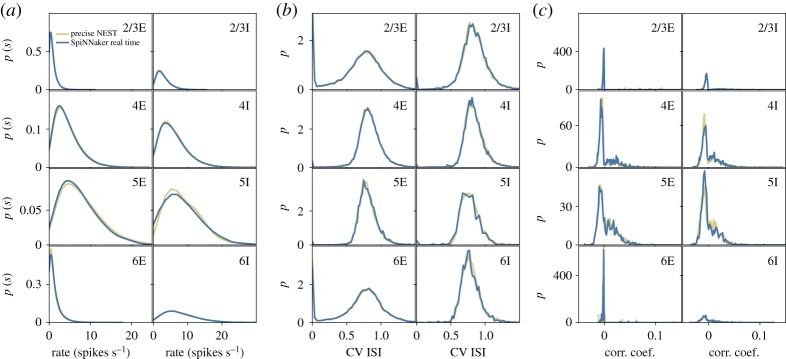
Real-time simulation of a large-scale biologically representative spiking neural network is presented, through the use of a heterogeneous parallelization scheme and SpiNNaker neuromorphic hardware. A published cortical microcircuit model is used as a benchmark test case, representing ≈1 mm2 of early sensory cortex, containing 77 k neurons and 0.3 billion synapses. This is the first hard real-time simulation of this model, with 10 s of biological simulation time executed in 10 s wall-clock time. This surpasses best-published efforts on HPC neural simulators (3 × slowdown) and GPUs running optimized spiking neural network (SNN) libraries (2 × slowdown). Furthermore, the presented approach indicates that real-time processing can be maintained with increasing SNN size, breaking the communication barrier incurred by traditional computing machinery. Model results are compared to an established HPC simulator baseline to verify simulation correctness, comparing well across a range of statistical measures. Energy to solution and energy per synaptic event are also reported, demonstrating that the relatively low-tech SpiNNaker processors achieve a 10 × reduction in energy relative to modern HPC systems, and comparable energy consumption to modern GPUs. Finally, system robustness is demonstrated through multiple 12 h simulations of the cortical microcircuit, each simulating 12 h of biological time, and demonstrating the potential of neuromorphic hardware as a neuroscience research tool for studying complex spiking neural networks over extended time periods. This article is part of the theme issue 'Harmonizing energy-autonomous computing and intelligence'.
Keywords: SpiNNaker; cortical microcircuit; low-power; neuromorphic; parallel programming; real time.
Conflict of interest statement
S.B.F. is a founder, director and shareholder of Cogniscience Ltd, which owns SpiNNaker IP. L.A.P. and A.G.D.R. are shareholders of Cogniscience Ltd.
Figures
References
-
- Maass W, Markram H. 2004. On the computational power of circuits of spiking neurons. J. Comput. Syst. Sci. 69, 593–616. (10.1016/j.jcss.2004.04.001) - DOI
-
- Shi W, Cao J, Zhang Q, Li Y, Lanyu X. 2016. Edge computing: vision and challenges. IEEE Internet Things J. 3, 637–646. (10.1109/JIOT.2016.2579198) - DOI
-
- Furber SB, Lester DR, Plana LA, Garside JD, Painkras E, Temple S, Brown AD. 2013. Overview of the SpiNNaker system architecture. IEEE Trans. Comput. 62, 2454–2467. (10.1109/tc.2012.142) - DOI
MeSH terms
LinkOut - more resources
Full Text Sources