

Hand Gesture Recognition Using Compact CNN Via Surface Electromyography Signals
- PMID: 31991849
- PMCID: PMC7039218
- DOI: 10.3390/s20030672
Hand Gesture Recognition Using Compact CNN Via Surface Electromyography Signals
Abstract
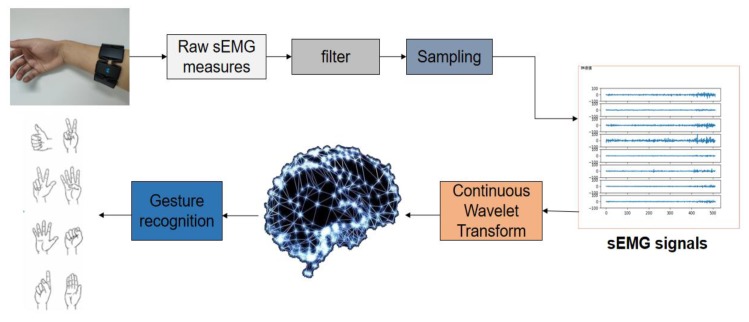
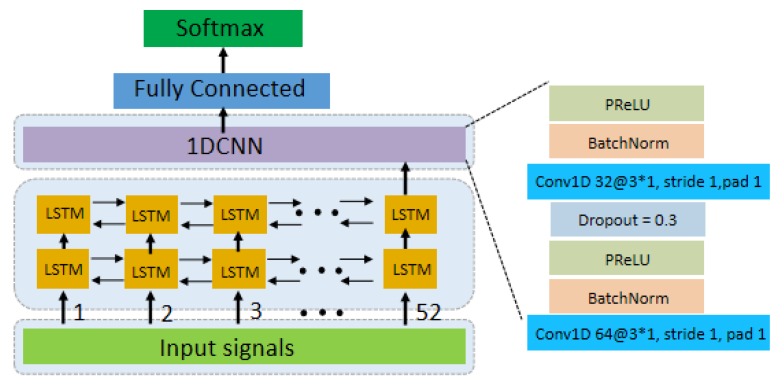
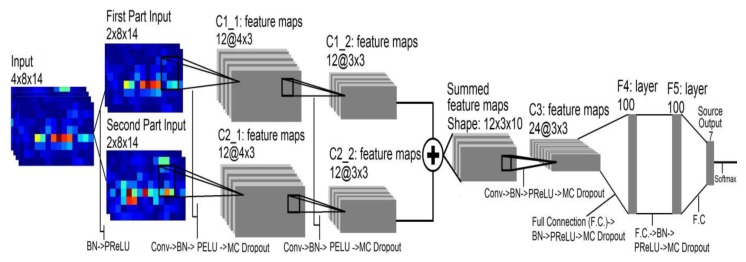
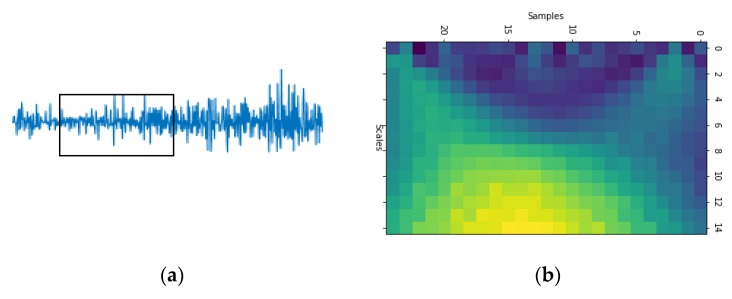
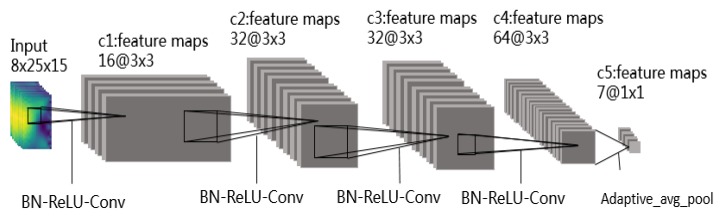
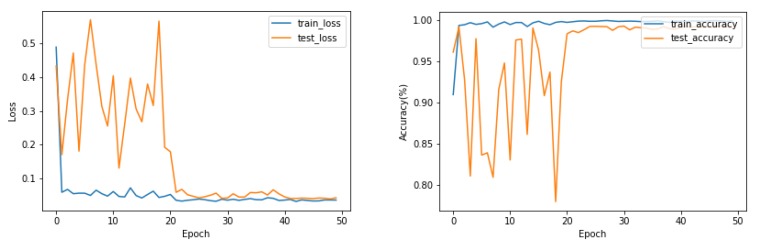
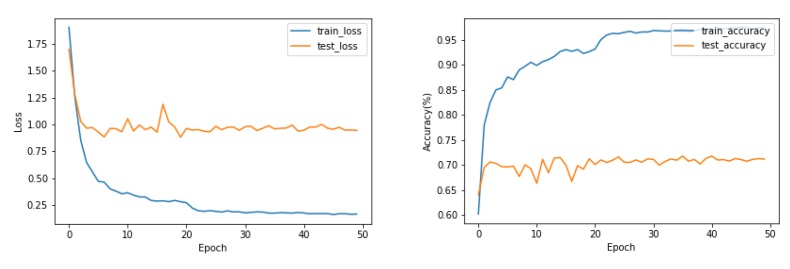
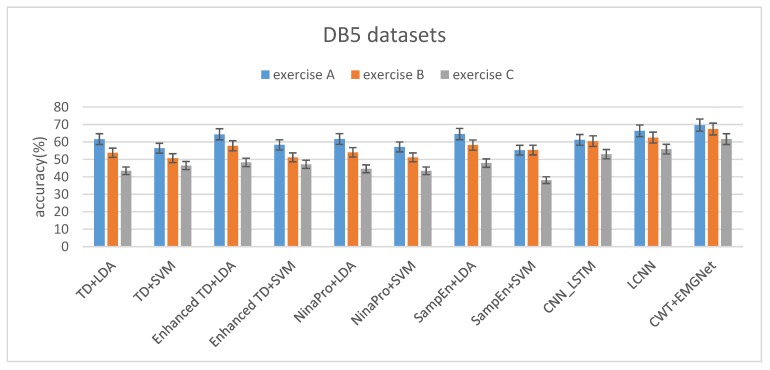
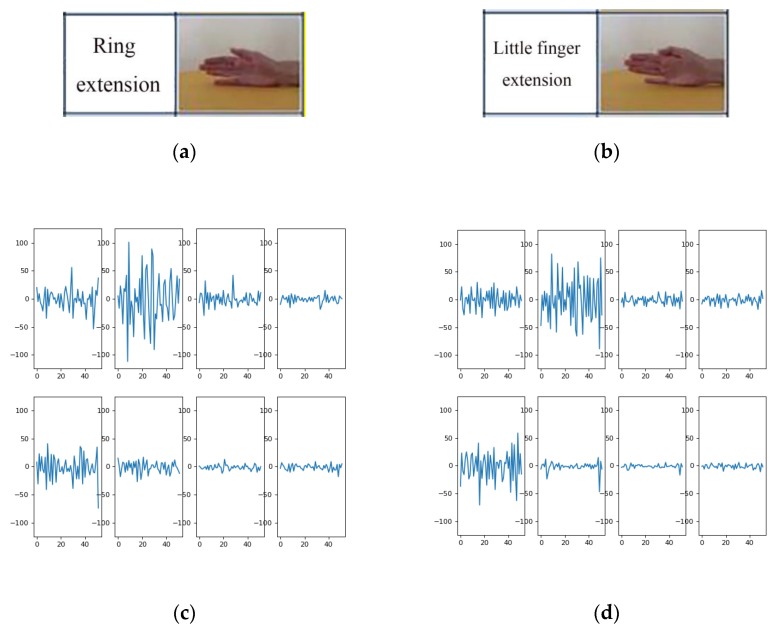
By training the deep neural network model, the hidden features in Surface Electromyography(sEMG) signals can be extracted. The motion intention of the human can be predicted by analysis of sEMG. However, the models recently proposed by researchers often have a large number of parameters. Therefore, we designed a compact Convolution Neural Network (CNN) model, which not only improves the classification accuracy but also reduces the number of parameters in the model. Our proposed model was validated on the Ninapro DB5 Dataset and the Myo Dataset. The classification accuracy of gesture recognition achieved good results.
Keywords: convolution neural networks (CNNs); hand gesture recognition; surface electromyography (sEMG).
Conflict of interest statement
The authors declare no conflicts of interest.
Figures

References
-
- Oskoei M.A., Hu H. Myoelectric control systems—A survey. Biomed. Signal Process. Control. 2007;2:275–294. doi: 10.1016/j.bspc.2007.07.009. - DOI
-
- Phinyomark A., Hirunviriya S., Limsakul C., Phukpattaranont P. Evaluation of EMG feature extraction for hand movement recognition based on Euclidean distance and standard deviation; Proceedings of the ECTI-CON2010: The 2010 ECTI International Confernce on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology; Chiang Mai, Thailand. 19–21 May 2010; pp. 856–860.
-
- Phinyomark A., Phukpattaranont P., Limsakul C. Feature reduction and selection for EMG signal classification. Expert Syst. Appl. 2012;39:7420–7431. doi: 10.1016/j.eswa.2012.01.102. - DOI
-
- Khushaba R.N., Kodagoda S. Electromyogram (EMG) Feature Reduction Using Mutual Components Analysis for Multifunction Prosthetic Fingers Control; Proceedings of the 2012 12th International Conference on Control Automation Robotics Vision (ICARCV); Guangzhou, China. 5–7 December 2012; pp. 1534–1539.
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
