Four-dimensional micro-building blocks
- PMID: 32010763
- PMCID: PMC6968937
- DOI: 10.1126/sciadv.aav8219
Four-dimensional micro-building blocks
Abstract
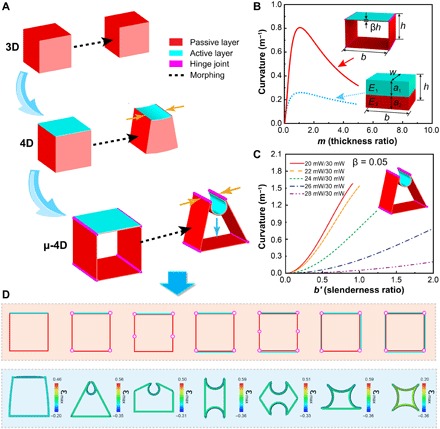
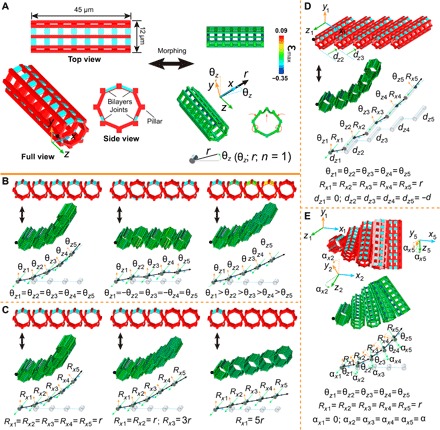
Four-dimensional (4D) printing relies on multimaterial printing, reinforcement patterns, or micro/nanofibrous additives as programmable tools to achieve desired shape reconfigurations. However, existing programming approaches still follow the so-called origami design principle to generate reconfigurable structures by self-folding stacked 2D materials, particularly at small scales. Here, we propose a programmable modular design that directly constructs 3D reconfigurable microstructures capable of sophisticated 3D-to-3D shape transformations by assembling 4D micro-building blocks. 4D direct laser writing is used to print two-photon polymerizable, stimuli-responsive hydrogels to construct building blocks at micrometer scales. Denavit-Hartenberg (DH) parameters, used to define robotic arm kinematics, are introduced as guidelines for how to assemble the micro-building blocks and plan the 3D motion of assembled chain blocks. Last, a 3D-printed microscaled transformer capable of changing its shape from a race car to a humanoid robot is devised and fabricated using the DH parameters to guide the motion of various assembled compartments.
Copyright © 2020 The Authors, some rights reserved; exclusive licensee American Association for the Advancement of Science. No claim to original U.S. Government Works. Distributed under a Creative Commons Attribution NonCommercial License 4.0 (CC BY-NC).
Figures



References
-
- Pikul J. H., Li S., Bai H., Hanlon R. T., Cohen I., Shepherd R. F., Stretchable surfaces with programmable 3D texture morphing for synthetic camouflaging skins. Science 358, 210–214 (2017). - PubMed
-
- Hawkes E. W., Blumenschein L. H., Greer J. D., Okamura A. M., A soft robot that navigates its environment through growth. Sci. Robot. 2, eaan3028 (2017). - PubMed
-
- Shin B., Ha J., Lee M., Park K., Park G. H., Choi T. H., Cho K.-J., Kim H.-Y., Hygrobot: A self-locomotive ratcheted actuator powered by environmental humidity. Sci. Robot. 3, eaar2629 (2018). - PubMed
-
- Huang H.-W., Tibbitt M. W., Huang T.-Y., Nelson B. J., Matryoshka-inspired micro-origami capsules to enhance loading, encapsulation, and transport of drugs. Soft Robot. 6, 150–159 (2019). - PubMed
Publication types
LinkOut - more resources
Full Text Sources