

Surface Electromyography-Controlled Automobile Steering Assistance
- PMID: 32024313
- PMCID: PMC7038780
- DOI: 10.3390/s20030809
Surface Electromyography-Controlled Automobile Steering Assistance
Abstract
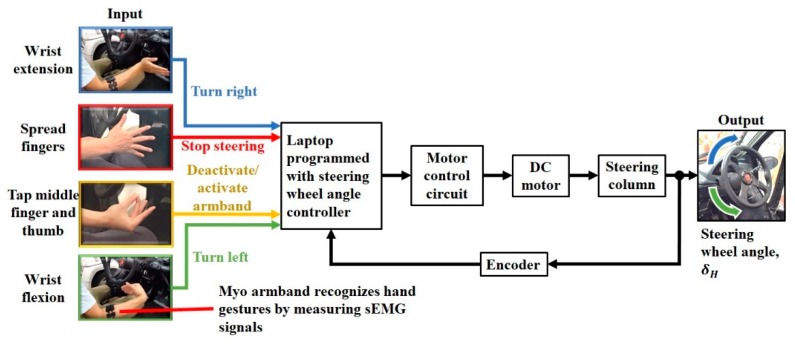
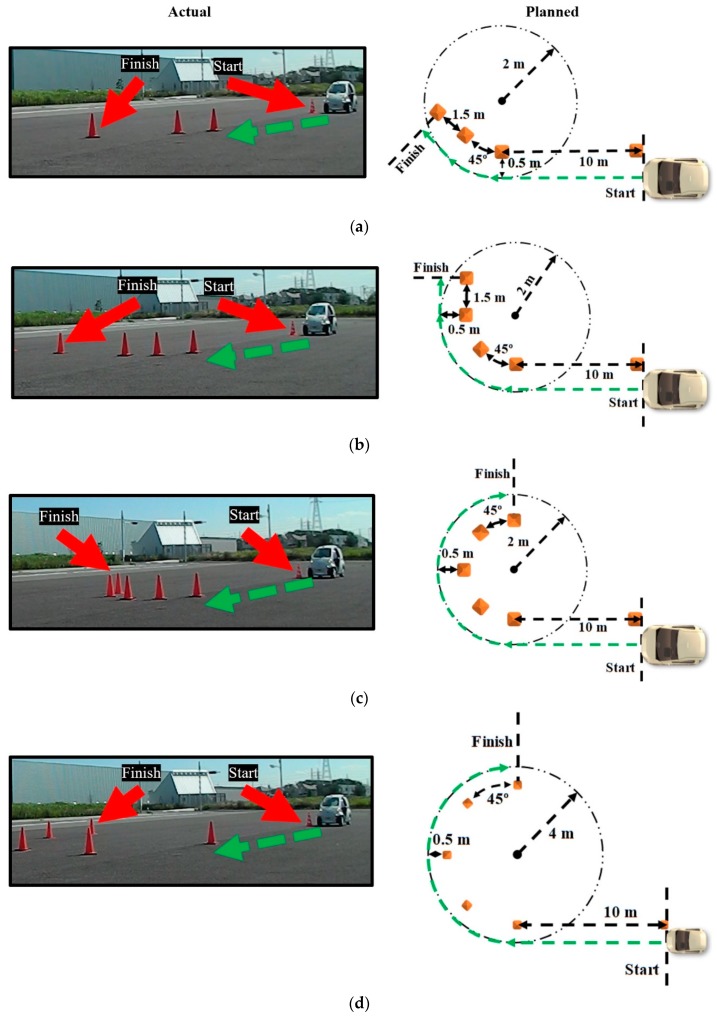
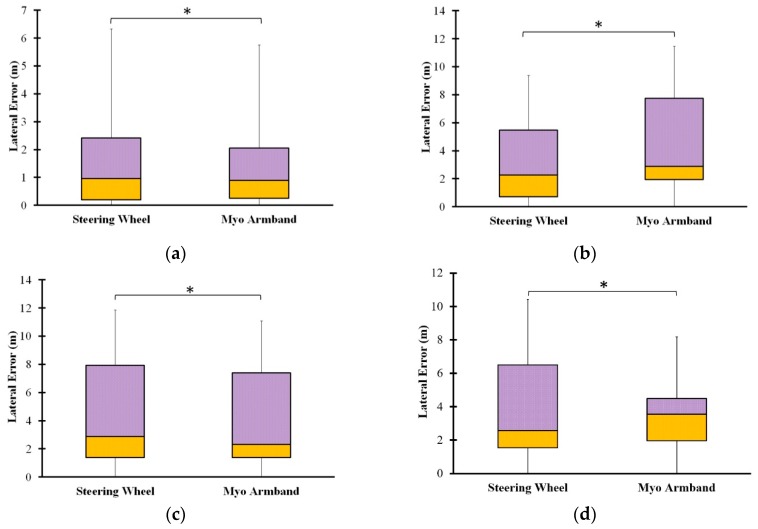
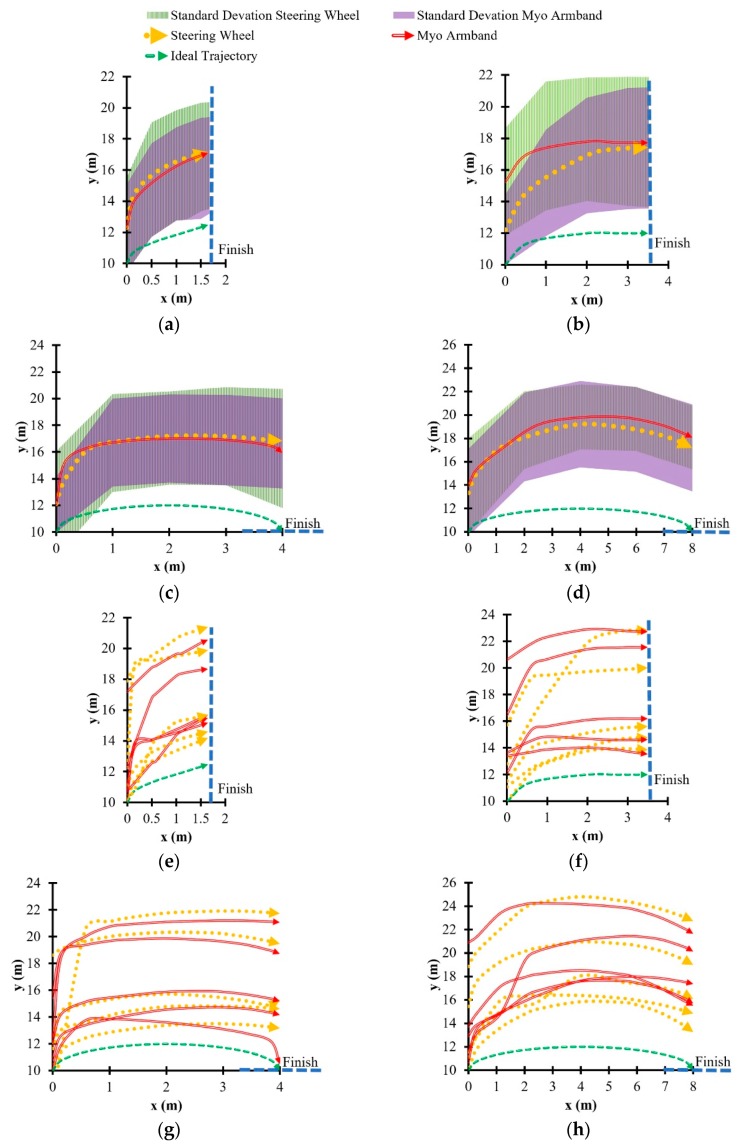
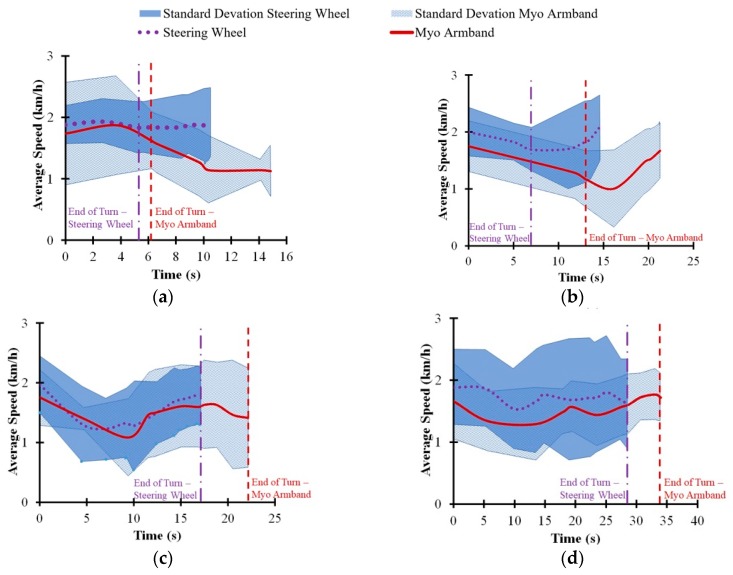
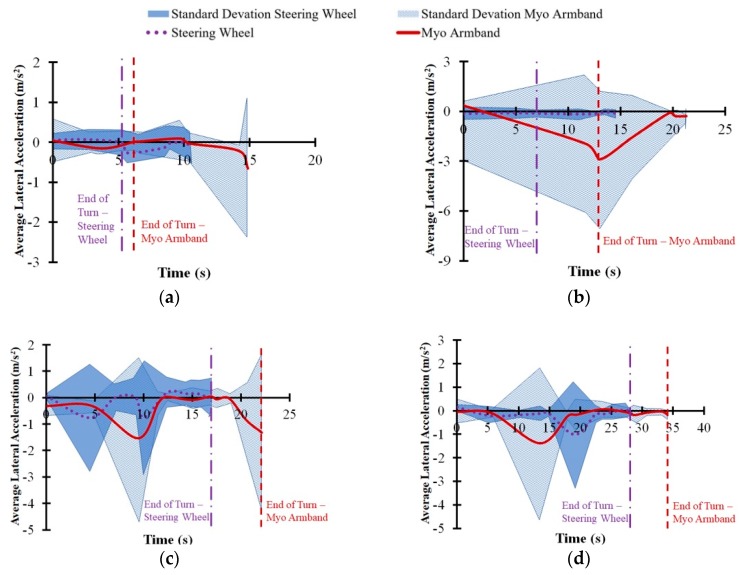
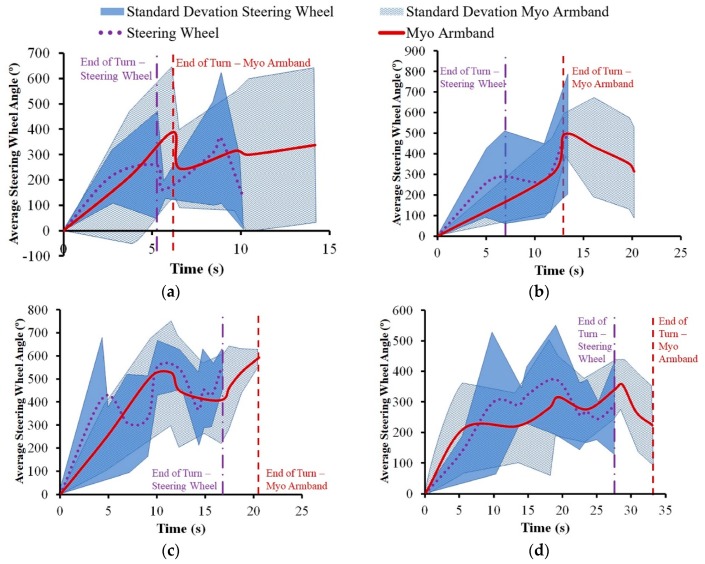
Disabilities of the upper limb, such as hemiplegia or upper limb amputation, can limit automobile drivers to steering with one healthy arm. For the benefit of these drivers, recent studies have developed prototype interfaces that realized surface electromyography (sEMG)-controlled steering assistance with path-following accuracy that has been validated with driving simulations. In contrast, the current study expands the application of sEMG-controlled steering assistance by validating the Myo armband, a mass-produced sEMG-based interface, with respect to the path-following accuracy of a commercially available automobile. It was hypothesized that one-handed remote steering with the Myo armband would be comparable or superior to the conventional operation of the automobile steering wheel. Although results of low-speed field testing indicate that the Myo armband had lower path-following accuracy than the steering wheel during a 90° turn and wide U-turn at twice the minimum turning radius, the Myo armband had superior path-following accuracy for a narrow U-turn at the minimum turning radius and a 45° turn. Given its overall comparability to the steering wheel, the Myo armband could be feasibly applied in future automobile studies.
Keywords: advanced driver assistance system (ADAS); automated driving; human-machine interface (HMI); surface electromyography (sEMG).
Conflict of interest statement
The authors declare no conflict of interest.
Figures

References
-
- Minato T., Murata Y., Suzuki A. Proposal of Automobile Driving Interface Using Strain Sensor for the Disabled People; Proceedings of the 2015 Tohoku-Section Joint Convention of Institutes of Electrical and Information Engineers; Takizawa, Japan. 6 September 2015.
-
- Kukkala V.K., Tunnell J., Pasricha S., Bradley T. Advanced Driver-Assistance Systems: A Path Toward Autonomous Vehicles. IEEE Consum. Electron. Mag. 2018;7:18–25. doi: 10.1109/MCE.2018.2828440. - DOI
-
- Sucu B., Folmer E. The Blind Driver Challenge: Steering Using Haptic Cues; Proceedings of the 16th International ACM SIGACCESS Conference on Computers & Accessibility; New York, NY, USA. 20–22 October 2014; pp. 3–10.
MeSH terms
LinkOut - more resources
Full Text Sources
