

Ground and In-Flight Calibration of the OSIRIS-REx Camera Suite
- PMID: 32025061
- PMCID: PMC6979463
- DOI: 10.1007/s11214-019-0626-6
Ground and In-Flight Calibration of the OSIRIS-REx Camera Suite
Abstract
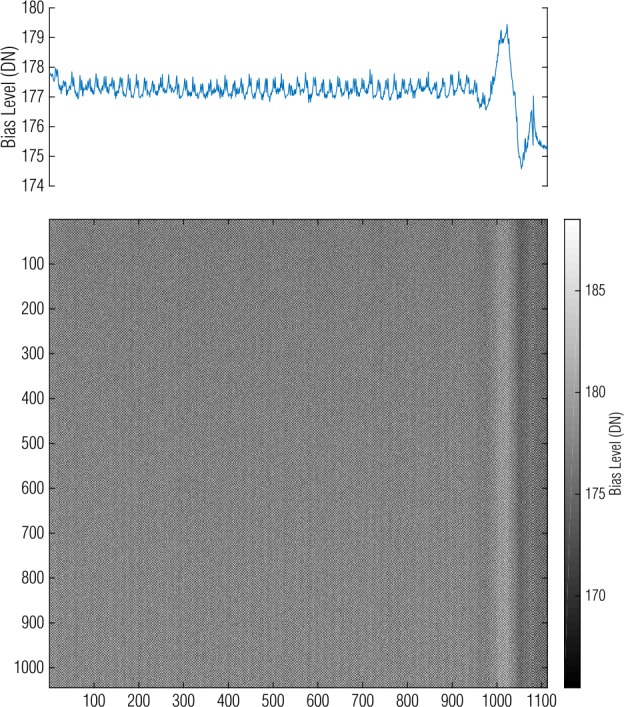
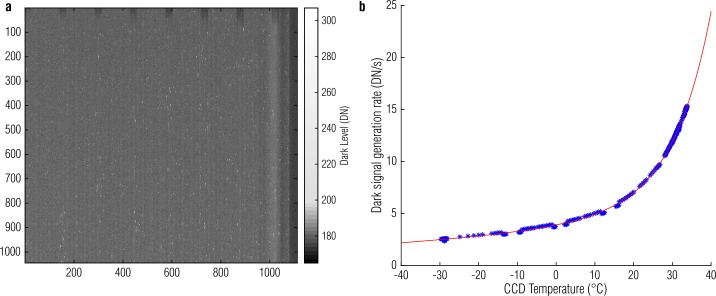
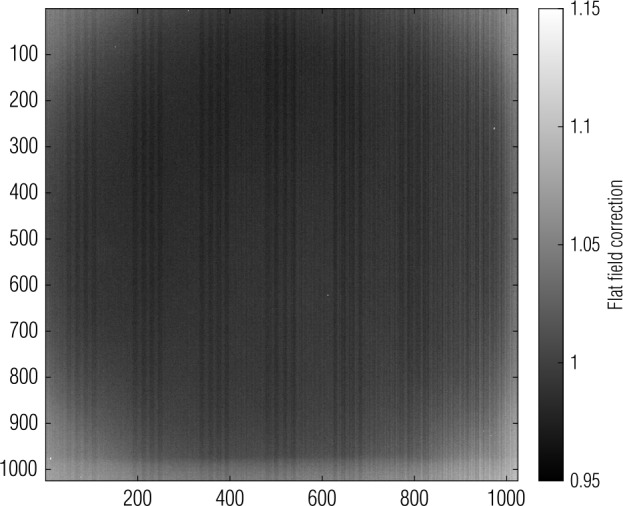
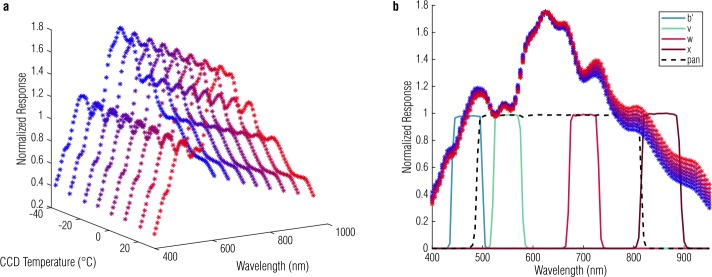
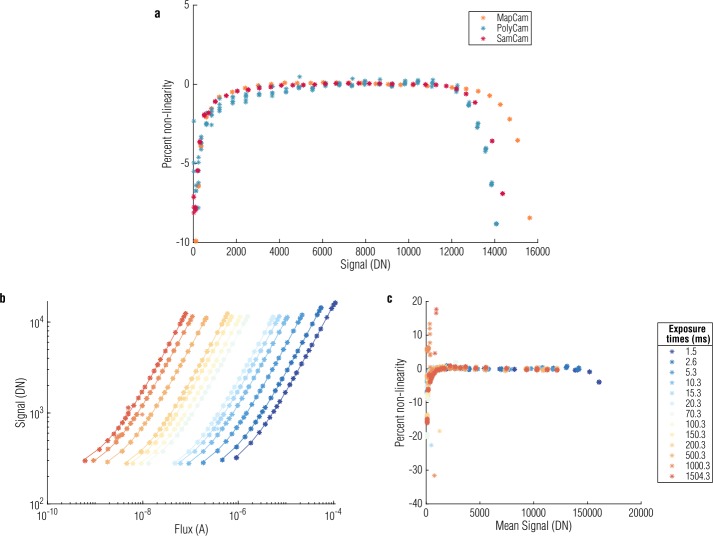
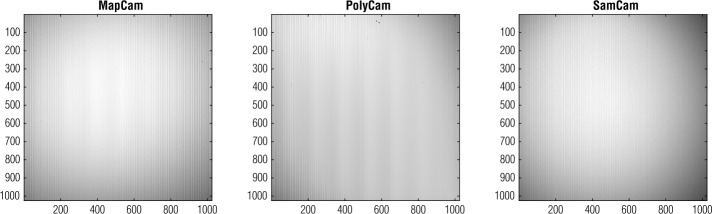
The OSIRIS-REx Camera Suite (OCAMS) onboard the OSIRIS-REx spacecraft is used to study the shape and surface of the mission's target, asteroid (101955) Bennu, in support of the selection of a sampling site. We present calibration methods and results for the three OCAMS cameras-MapCam, PolyCam, and SamCam-using data from pre-flight and in-flight calibration campaigns. Pre-flight calibrations established a baseline for a variety of camera properties, including bias and dark behavior, flat fields, stray light, and radiometric calibration. In-flight activities updated these calibrations where possible, allowing us to confidently measure Bennu's surface. Accurate calibration is critical not only for establishing a global understanding of Bennu, but also for enabling analyses of potential sampling locations and for providing scientific context for the returned sample.
Keywords: (101955) Bennu; Asteroids; Data reduction techniques; Instrumentation; OSIRIS-REx.
© The Author(s) 2020.
Figures
References
-
- Barker M.K., Mazarico E., Neumann G.A., Zuber M.T., Haruyama J., Smith D.E. Icarus. 2016;273:346. doi: 10.1016/j.icarus.2015.07.039. - DOI
-
- Choi M.K. Planet. Def. Sp. Environ. Appl. 2016;9981:99810E.
-
- Choi M.K., Bos B.J., Tveekrem J.L., D’Aubigny C., Rizk B., Lauretta D.S. Abstr. 2019-3966 Present. 2019 AIAA Propuls. Energy; 2019.
-
- Clark B.E., Binzel R.P., Howell E.S., Cloutis E.A., Ockert-Bell M., Christensen P., Barucci M.A., DeMeo F., Lauretta D.S., Connolly H., Soderberg A., Hergenrother C., Lim L., Emery J., Mueller M. Icarus. 2011;216:462. doi: 10.1016/j.icarus.2011.08.021. - DOI
-
- Crombie M., Selznick S., Loveridge M., Rizk B., DellaGiustina D.N., Golish D.R., Bos B.J., Christensen P.R., Hamilton V.E., Reuter D., Simon A.A., Barnouin O.S., Daly M.G., Espiritu R.C., Clark B., Nolan M.C., Lauretta D.S. Abstr. P33C-3858 Present. 2018 Fall Meet. Washington: AGU; 2018.
Publication types
LinkOut - more resources
Full Text Sources
Other Literature Sources