

The effect of tactile augmentation on manipulation and grip force control during force-field adaptation
- PMID: 32046743
- PMCID: PMC7014637
- DOI: 10.1186/s12984-020-0649-y
The effect of tactile augmentation on manipulation and grip force control during force-field adaptation
Abstract
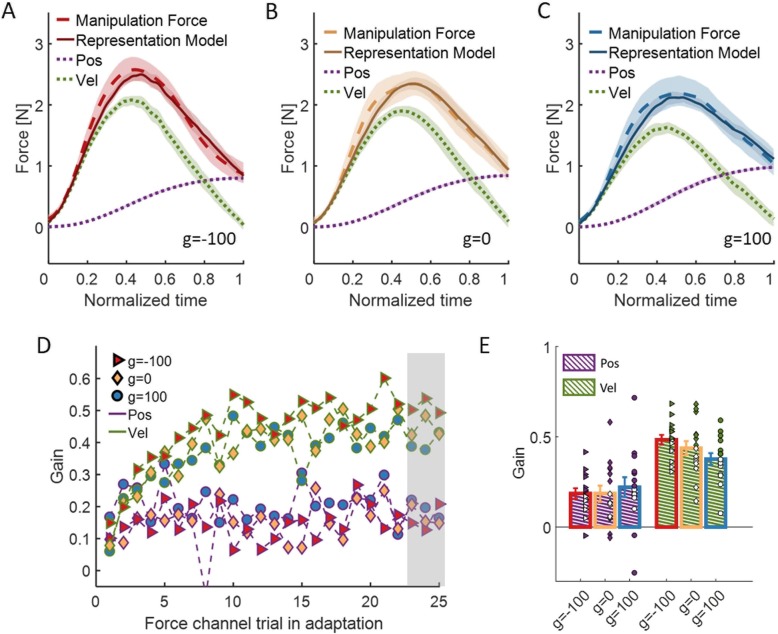
Background: When exposed to a novel dynamic perturbation, participants adapt by changing their movements' dynamics. This adaptation is achieved by constructing an internal representation of the perturbation, which allows for applying forces that compensate for the novel external conditions. To form an internal representation, the sensorimotor system gathers and integrates sensory inputs, including kinesthetic and tactile information about the external load. The relative contribution of the kinesthetic and tactile information in force-field adaptation is poorly understood.
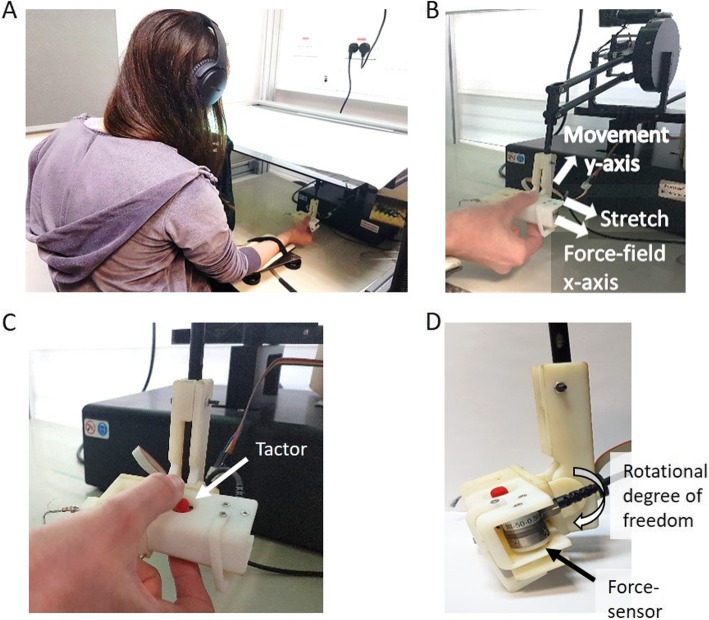
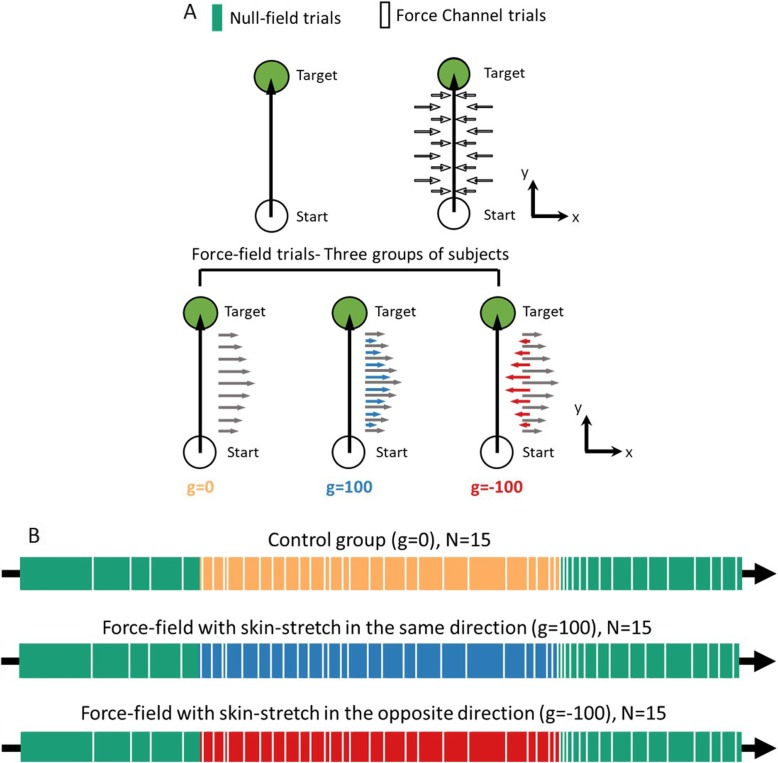
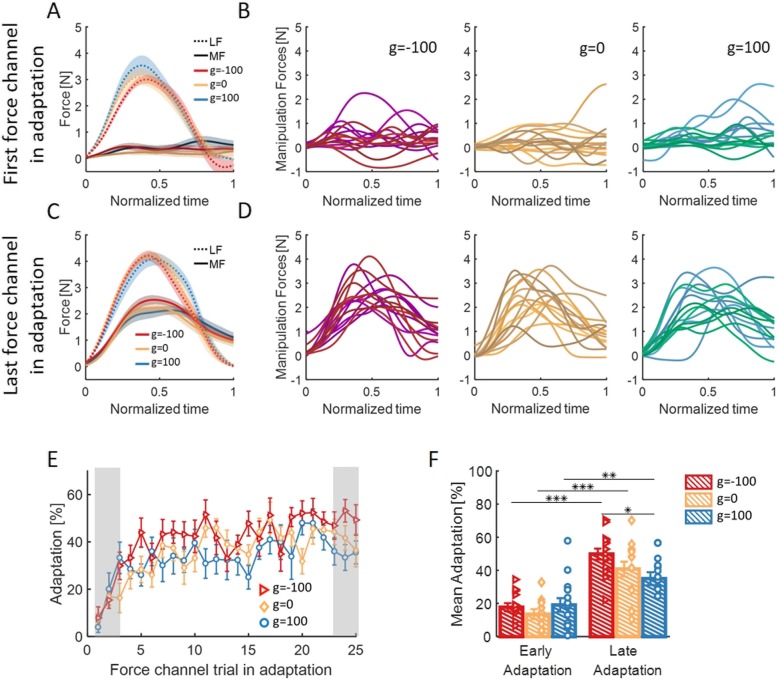
Methods: In this study, we set out to establish the effect of augmented tactile information on adaptation to force-field. Two groups of participants received a velocity-dependent tangential skin deformation from a custom-built skin-stretch device together with a velocity-dependent force-field from a kinesthetic haptic device. One group experienced a skin deformation in the same direction of the force, and the other in the opposite direction. A third group received only the velocity-dependent force-field.
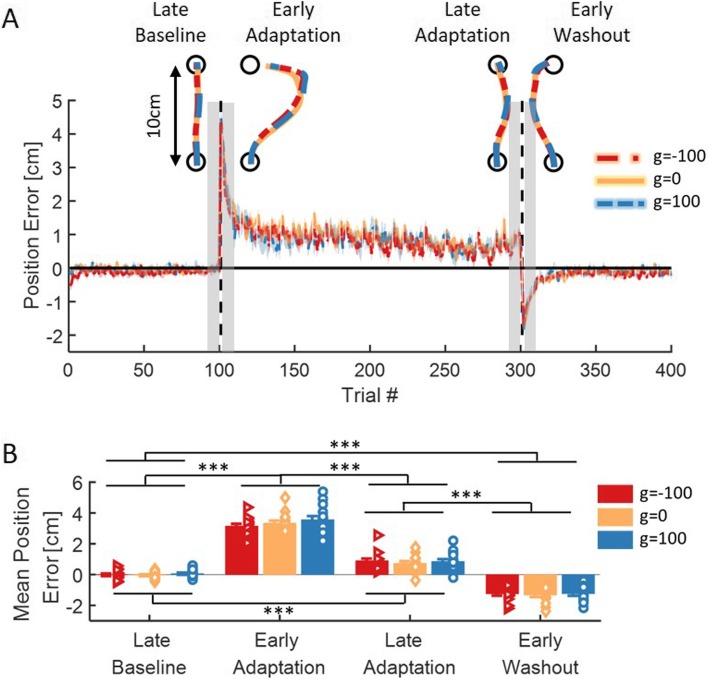
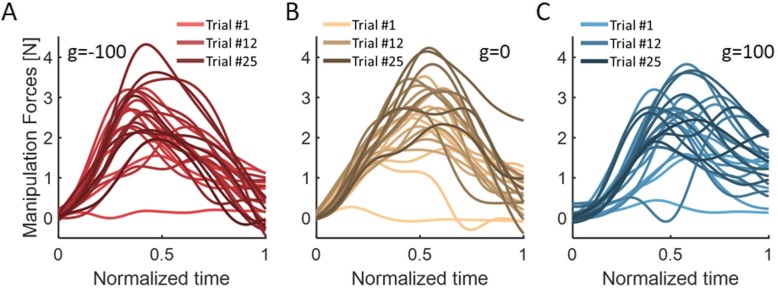
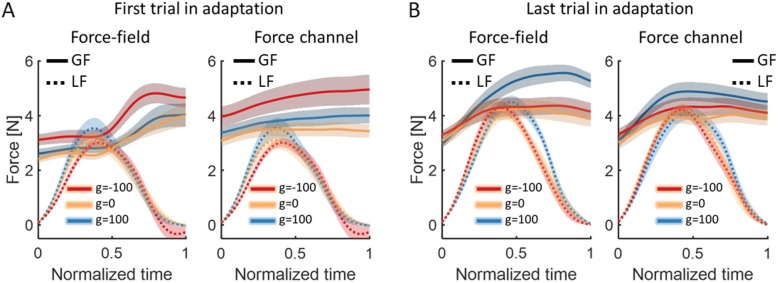
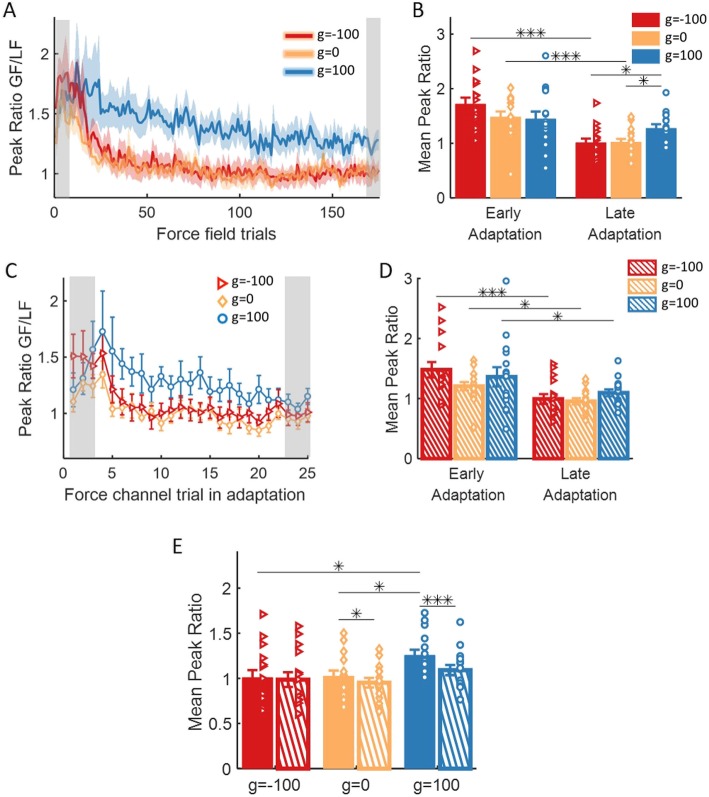
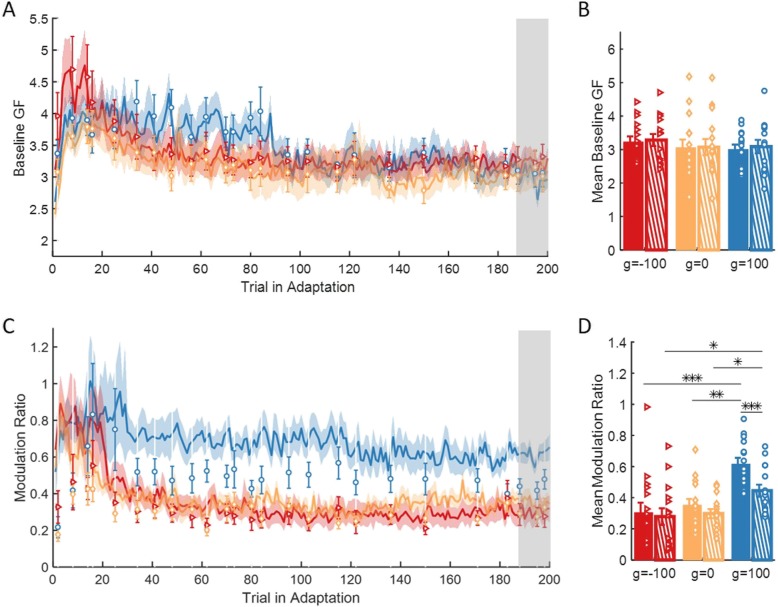
Results: We found that adding a skin deformation did not affect the kinematics of the movement during adaptation. However, participants who received skin deformation in the opposite direction adapted their manipulation forces faster and to a greater extent than those who received skin deformation in the same direction of the force. In addition, we found that skin deformation in the same direction to the force-field caused an increase in the applied grip-force per amount of load force, both in response and in anticipation of the stretch, compared to the other two groups.
Conclusions: Augmented tactile information affects the internal representations for the control of manipulation and grip forces, and these internal representations are likely updated via distinct mechanisms. We discuss the implications of these results for assistive and rehabilitation devices.
Keywords: Force-field adaptation; Grip force control; Manipulation force control; Sensory augmentation; Skin-stretch.
Conflict of interest statement
The authors declare that they have no competing interests.
Figures
Similar articles
-
Stretching the skin immediately enhances perceived stiffness and gradually enhances the predictive control of grip force.Elife. 2020 Apr 15;9:e52653. doi: 10.7554/eLife.52653. Elife. 2020. PMID: 32292163 Free PMC article.
-
Visual and tactile information about object-curvature control fingertip forces and grasp kinematics in human dexterous manipulation.J Neurophysiol. 2000 Dec;84(6):2984-97. doi: 10.1152/jn.2000.84.6.2984. J Neurophysiol. 2000. PMID: 11110826 Clinical Trial.
-
Direction-Specific Effects of Artificial Skin-Stretch on Stiffness Perception and Grip Force Control.IEEE Trans Haptics. 2023 Oct-Dec;16(4):836-847. doi: 10.1109/TOH.2023.3332295. Epub 2023 Dec 21. IEEE Trans Haptics. 2023. PMID: 37956003
-
The cutaneous contribution to adaptive precision grip.Trends Neurosci. 2004 Oct;27(10):637-43. doi: 10.1016/j.tins.2004.08.006. Trends Neurosci. 2004. PMID: 15374677 Review.
-
Sensory input and control of grip.Novartis Found Symp. 1998;218:45-59; discussion 59-63. doi: 10.1002/9780470515563.ch4. Novartis Found Symp. 1998. PMID: 9949815 Review.
Cited by
-
Individual Differences in Sensorimotor Adaptation Are Conserved Over Time and Across Force-Field Tasks.Front Hum Neurosci. 2021 Nov 30;15:692181. doi: 10.3389/fnhum.2021.692181. eCollection 2021. Front Hum Neurosci. 2021. PMID: 34916916 Free PMC article.
-
Data-Driven Classification of Human Movements in Virtual Reality-Based Serious Games: Preclinical Rehabilitation Study in Citizen Science.JMIR Serious Games. 2022 Feb 10;10(1):e27597. doi: 10.2196/27597. JMIR Serious Games. 2022. PMID: 35142629 Free PMC article.
-
Highlights from the 31st Annual Meeting of the Society for the Neural Control of Movement.J Neurophysiol. 2023 Jan 1;129(1):220-234. doi: 10.1152/jn.00500.2022. Epub 2022 Dec 21. J Neurophysiol. 2023. PMID: 36541602 Free PMC article. No abstract available.
-
A comparison of force adaptation in toddlers and adults during a drawer opening task.Sci Rep. 2025 Jan 29;15(1):3699. doi: 10.1038/s41598-025-87441-6. Sci Rep. 2025. PMID: 39880910 Free PMC article.
-
Integrating Tactile Feedback Technologies Into Home-Based Telerehabilitation: Opportunities and Challenges in Light of COVID-19 Pandemic.Front Neurorobot. 2021 Feb 17;15:617636. doi: 10.3389/fnbot.2021.617636. eCollection 2021. Front Neurorobot. 2021. PMID: 33679364 Free PMC article. Review.
References
-
- Kandel ER, Schwartz JH, Jessell TM, Siegelbaum SA, Hudspeth AJ. Principles of neural science. New York: McGraw-hill; 2000.
-
- Farajian M, Leib R, Zaidenberg T, Mussa-Ivaldi F, Nisky I. Stretching the skin of the fingertip creates a perceptual and motor illusion of touching a harder spring. bioRxiv. 2017:203604.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
