

Characterizing the comfort limits of forces applied to the shoulders, thigh and shank to inform exosuit design
- PMID: 32049971
- PMCID: PMC7015417
- DOI: 10.1371/journal.pone.0228536
Characterizing the comfort limits of forces applied to the shoulders, thigh and shank to inform exosuit design
Abstract
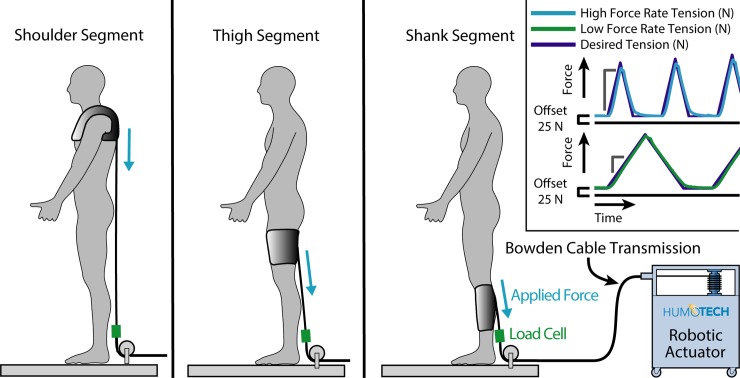
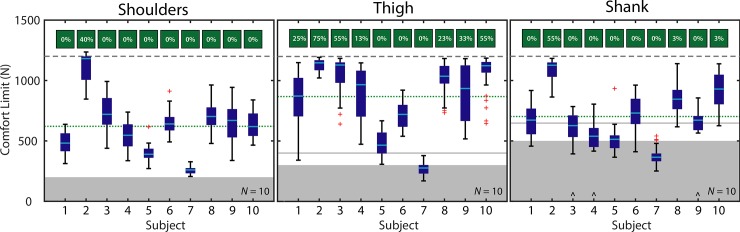
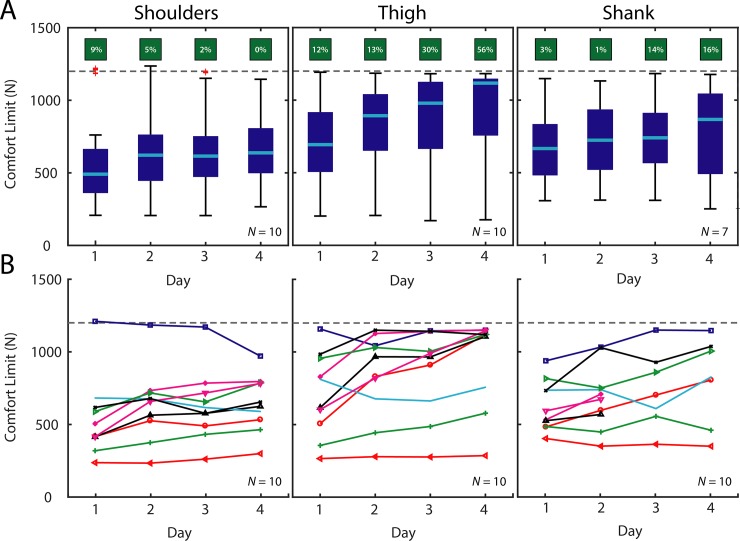
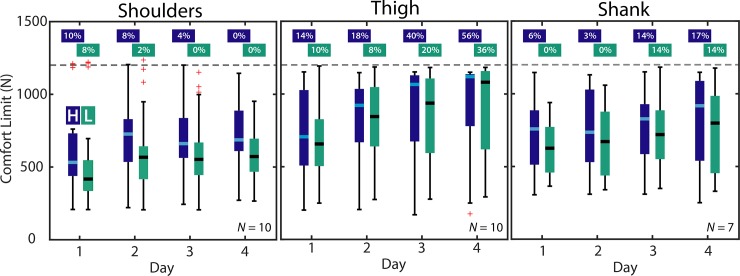
Recent literature emphasizes the importance of comfort in the design of exosuits and other assistive devices that physically augment humans; however, there is little quantitative data to aid designers in determining what level of force makes users uncomfortable. To help close this knowledge gap, we characterized human comfort limits when applying forces to the shoulders, thigh and shank. Our objectives were: (i) characterize the comfort limits for multiple healthy participants, (ii) characterize comfort limits across days, and (iii) determine if comfort limits change when forces are applied at higher vs. lower rates. We performed an experiment (N = 10) to quantify maximum tolerable force pulling down on the shoulders, and axially along the thigh and shank; we termed this force the comfort limit. We applied a series of forces of increasing magnitude, using a robotic actuator, to soft sleeves around their thigh and shank, and to a harness on their shoulders. Participants were instructed to press an off-switch, immediately removing the force, when they felt uncomfortable such that they did not want to feel a higher level of force. On average, participants exhibited comfort limits of ~0.9-1.3 times body weight on each segment: 621±245 N (shoulders), 867±296 N (thigh), 702±220 N (shank), which were above force levels applied by exosuits in prior literature. However, individual participant comfort limits varied greatly (~250-1200 N). Average comfort limits increased over multiple days (p<3e-5), as users habituated, from ~550-700 N on the first day to ~650-950 N on the fourth. Specifically, comfort limits increased 20%, 35% and 22% for the shoulders, thigh and shank, respectively. Finally, participants generally tolerated higher force when it was applied more rapidly. These results provide initial benchmarks for exosuit designers and end-users, and pave the way for exploring comfort limits over larger time scales, within larger samples and in different populations.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures
References
-
- Asbeck A. T., De Rossi S. M. M., Holt K. G., and Walsh C. J., “A biologically inspired soft exosuit for walking assistance,” The International Journal of Robotics Research, vol. 34, no. 6, pp. 744–762, May 2015, 10.1177/0278364914562476 - DOI
-
- A. T. Asbeck, K. Schmidt, I. Galiana, D. Wagner, and C. J. Walsh, “Multi-joint soft exosuit for gait assistance,” in 2015 IEEE International Conference on Robotics and Automation (ICRA), 2015, pp. 6197–6204, 10.1109/ICRA.2015.7140069 - DOI
-
- Yandell M. B., Tacca J. R., and Zelik K. E., “Design of a Low Profile, Unpowered Ankle Exoskeleton That Fits Under Clothes: Overcoming Practical Barriers to Widespread Societal Adoption,” IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 27, no. 4, pp. 712–723, April 2019, 10.1109/TNSRE.2019.2904924 - DOI - PMC - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Miscellaneous
