

Spatial Attention Fusion for Obstacle Detection Using MmWave Radar and Vision Sensor
- PMID: 32053909
- PMCID: PMC7070402
- DOI: 10.3390/s20040956
Spatial Attention Fusion for Obstacle Detection Using MmWave Radar and Vision Sensor
Abstract
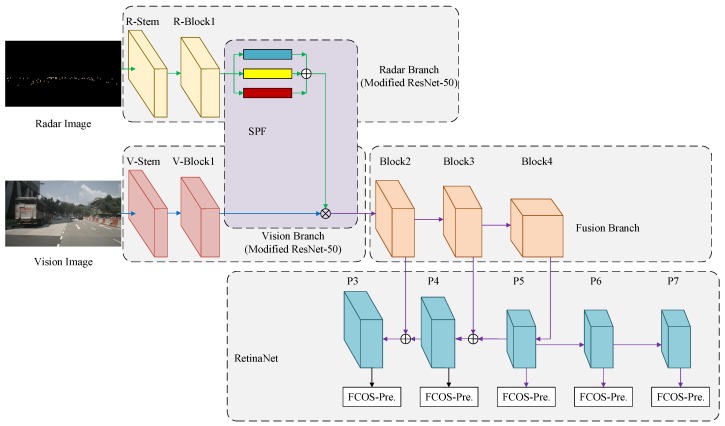
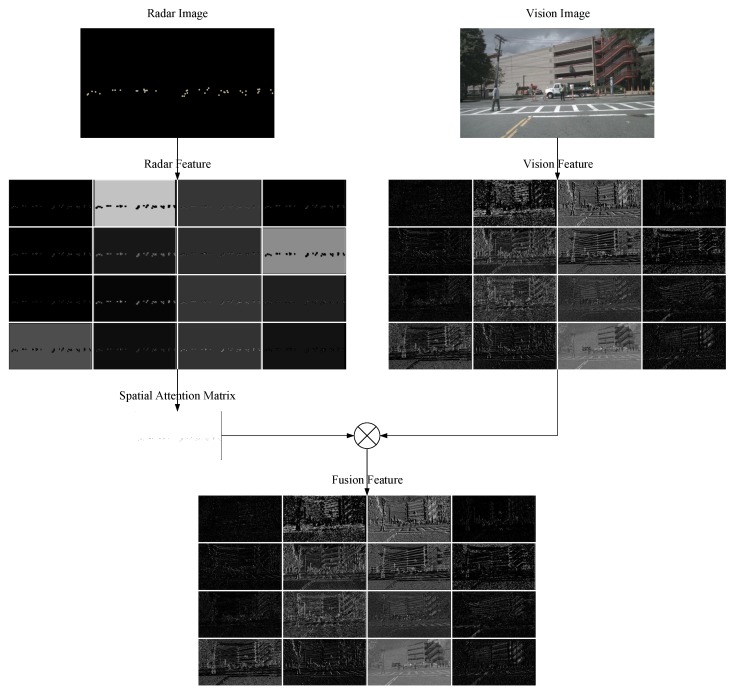
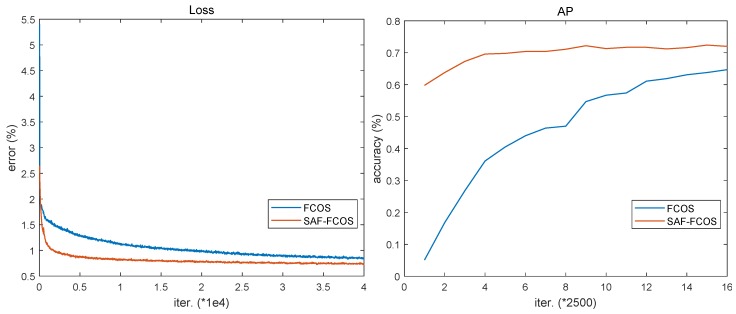
For autonomous driving, it is important to detect obstacles in all scales accurately for safety consideration. In this paper, we propose a new spatial attention fusion (SAF) method for obstacle detection using mmWave radar and vision sensor, where the sparsity of radar points are considered in the proposed SAF. The proposed fusion method can be embedded in the feature-extraction stage, which leverages the features of mmWave radar and vision sensor effectively. Based on the SAF, an attention weight matrix is generated to fuse the vision features, which is different from the concatenation fusion and element-wise add fusion. Moreover, the proposed SAF can be trained by an end-to-end manner incorporated with the recent deep learning object detection framework. In addition, we build a generation model, which converts radar points to radar images for neural network training. Numerical results suggest that the newly developed fusion method achieves superior performance in public benchmarking. In addition, the source code will be released in the GitHub.
Keywords: Autonomous Driving; MmWave Radar; Obstacle Detection; Spatial Attention Fusion; Vision.
Conflict of interest statement
The authors declare no conflict of interest.
Figures



References
-
- Redmon J., Divvala S., Girshick R., Farhadi A. You only look once: Unified, real-time object detection; Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR2016); Las Vegas, NV, USA. 27–30 June 2016; pp. 779–788.
-
- Liu W., Anguelov D., Erhan D. SSD: Single shot multibox detector; Proceedings of the European Conference on Computer Vision Workshops (ECCV 2016); Amsterdam, The Netherlands. 11–14 October 2016; pp. 21–37.
-
- Girshick R., Donahue J., Darrell T., Malik J. Rich feature hierarchies for accurate object detection and semantic segmentation; Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR2014); Columbus, OH, USA. 23–28 June 2014; pp. 580–587.
-
- Girshick R. Fast R-CNN; Proceedings of the IEEE International Conference on Computer Vision (ICCV2015); Santiago, Chile. 7–13 December 2015; pp. 1440–1448.
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
