

A Soft Transporter Robot Fueled by Light
- PMID: 32154076
- PMCID: PMC7055549
- DOI: 10.1002/advs.201902842
A Soft Transporter Robot Fueled by Light
Abstract
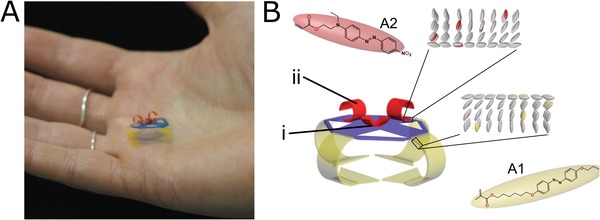
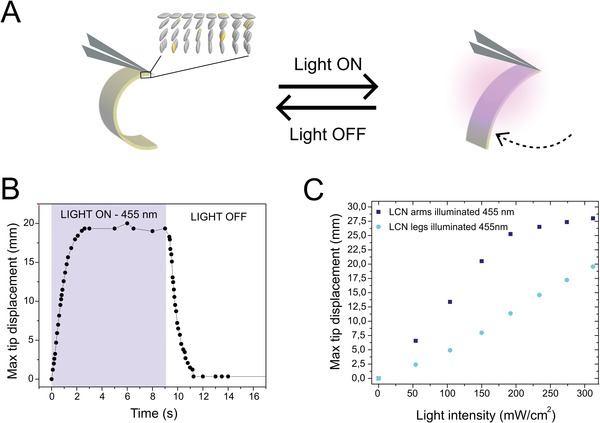
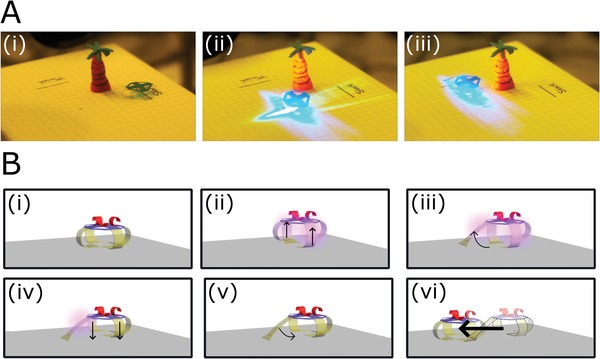
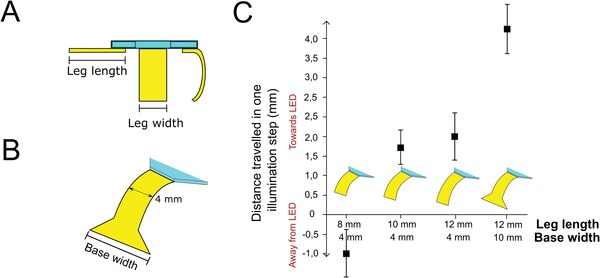
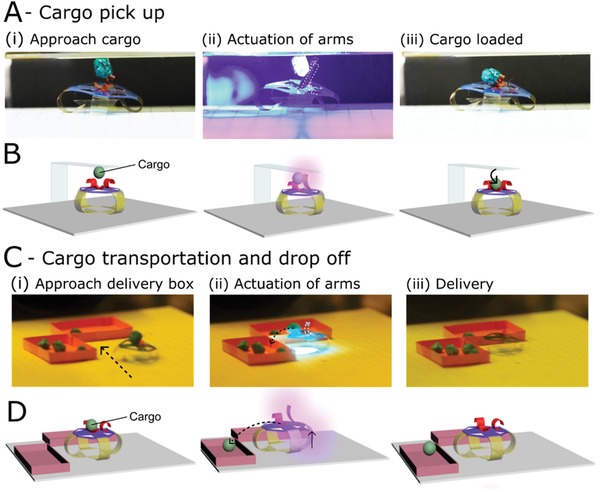
Mobile organisms with ability for locomotion and transportation, such as humans and other animals, utilize orchestrated actuation to perform actions. Mimicking these functionalities in synthetic, light-responsive untethered soft-bodied devices remains a challenge. Inspired by multitasking and mobile biological systems, an untethered soft transporter robot with controlled multidirectional locomotion with the ability of picking up, transporting, and delivering cargo driven entirely by blue light is created. The soft robot design is an ensemble of light-responsive liquid crystalline polymers that can harness motion either collectively or individually to obtain a high degree of motion control for the execution of advanced tasks in a dry environment. Through orchestrated motion of the device's "legs", single displacement strides, which exceed 4 mm and can be taken in any direction, allow for locomotion around objects. Untethered cargo transportation is demonstrated by a pickup and release mechanism using the device's "arms". This strategy demonstrates the constructive harnessing of orchestrated motion in assemblies of established actuators, performing complex functions, mimicking constructive behavior seen in nature.
Keywords: light‐driven soft robots; liquid crystal soft robots; photoactuators; untethered soft robotics.
© 2020 The Authors. Published by WILEY‐VCH Verlag GmbH & Co. KGaA, Weinheim.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- Rich S. I., Wood R. J., Majidi C., Nat. Electron. 2018, 1, 102.
-
- Nocentini S., Parmeggiani C., Martella D., Wiersma D. S., Adv. Opt. Mater. 2018, 6, 1800207.
-
- Whitesides G. M., Angew. Chem., Int. Ed. 2018, 57, 4258. - PubMed
-
- Majidi C., Adv. Mater. Technol. 2019, 4, 1800477.
LinkOut - more resources
Full Text Sources
Other Literature Sources