

Ultrasensitive Magnetic Field Sensors for Biomedical Applications
- PMID: 32168981
- PMCID: PMC7146409
- DOI: 10.3390/s20061569
Ultrasensitive Magnetic Field Sensors for Biomedical Applications
Abstract
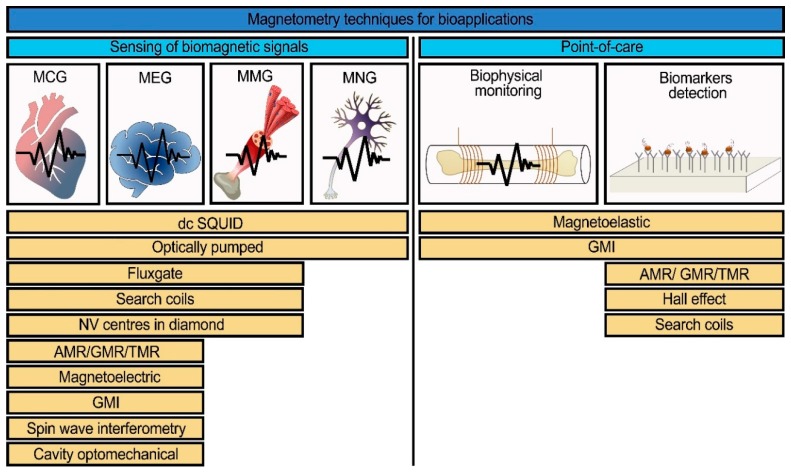
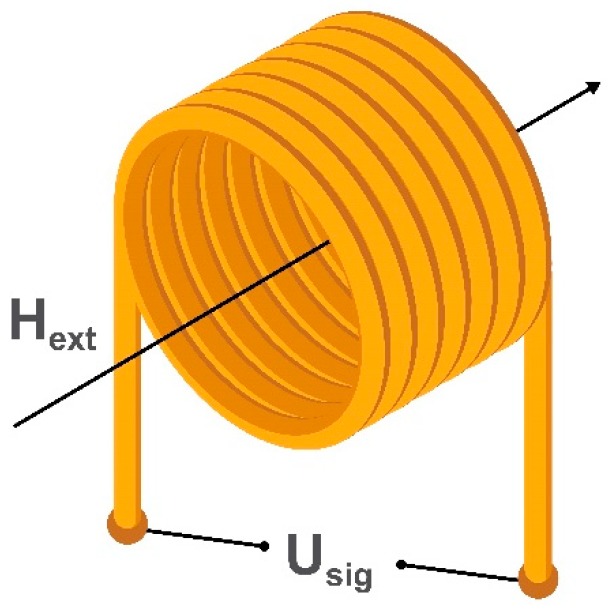
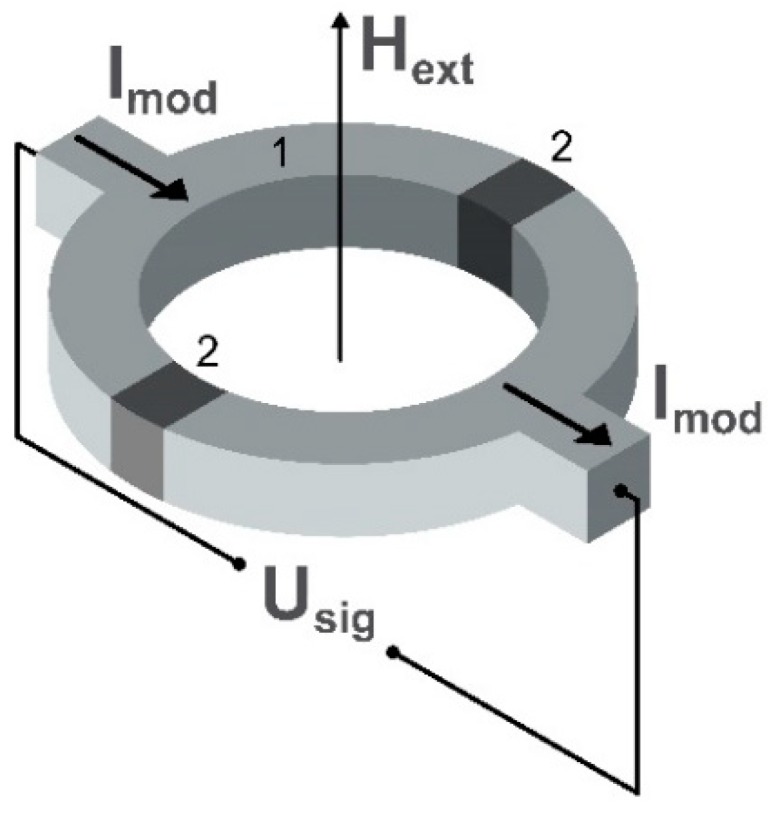
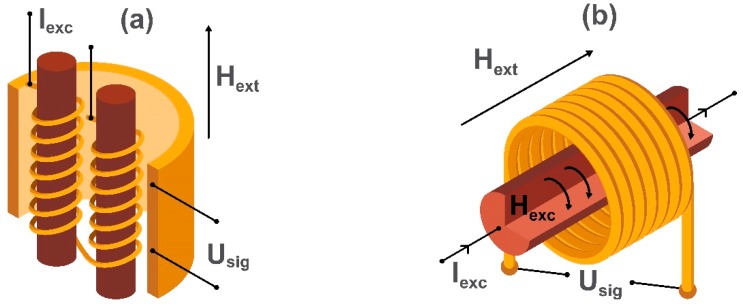
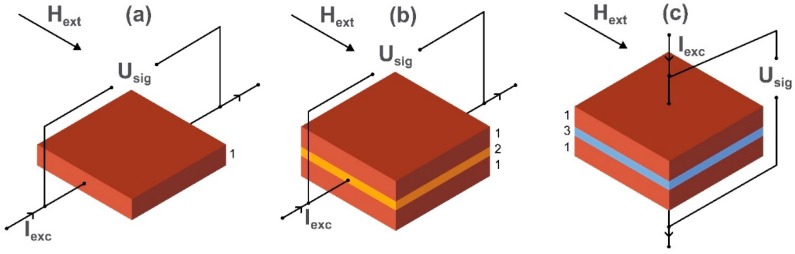
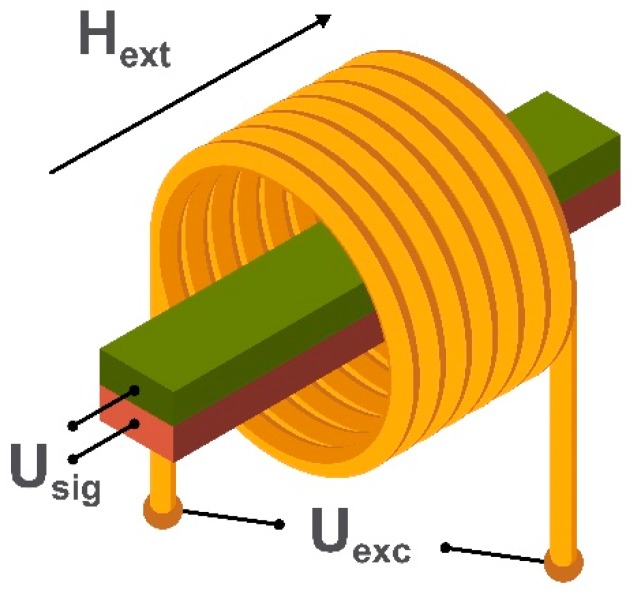
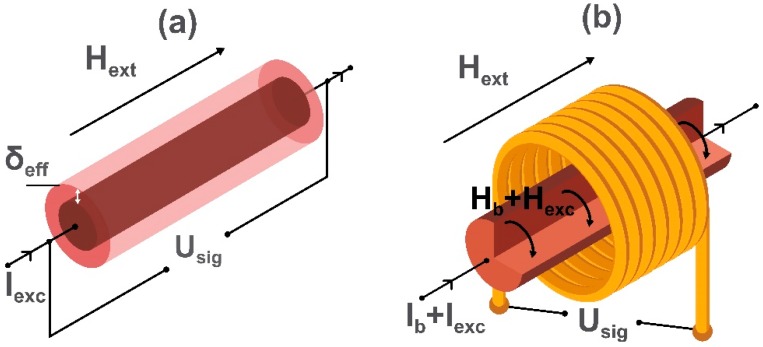
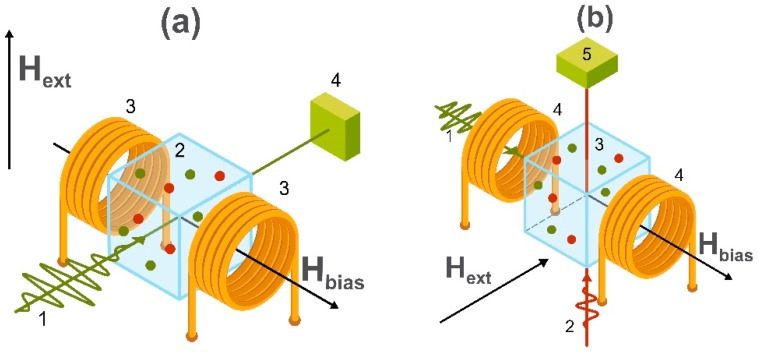
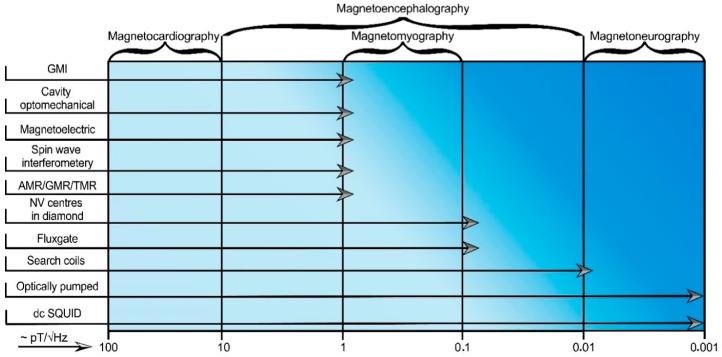
The development of magnetic field sensors for biomedical applications primarily focuses on equivalent magnetic noise reduction or overall design improvement in order to make them smaller and cheaper while keeping the required values of a limit of detection. One of the cutting-edge topics today is the use of magnetic field sensors for applications such as magnetocardiography, magnetotomography, magnetomyography, magnetoneurography, or their application in point-of-care devices. This introductory review focuses on modern magnetic field sensors suitable for biomedicine applications from a physical point of view and provides an overview of recent studies in this field. Types of magnetic field sensors include direct current superconducting quantum interference devices, search coil, fluxgate, magnetoelectric, giant magneto-impedance, anisotropic/giant/tunneling magnetoresistance, optically pumped, cavity optomechanical, Hall effect, magnetoelastic, spin wave interferometry, and those based on the behavior of nitrogen-vacancy centers in the atomic lattice of diamond.
Keywords: biomagnetic fields; biosensors; diagnosis; magnetic field sensors; noninvasive medical procedures; therapeutic application.
Conflict of interest statement
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
Figures
References
-
- Mapps D.J. Remote magnetic sensing of people. Sens. Actuators A Phys. 2003;106:321–325. doi: 10.1016/S0924-4247(03)00193-6. - DOI
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
