

Time-to-Target Simplifies Optimal Control of Visuomotor Feedback Responses
- PMID: 32213555
- PMCID: PMC7189480
- DOI: 10.1523/ENEURO.0514-19.2020
Time-to-Target Simplifies Optimal Control of Visuomotor Feedback Responses
Abstract
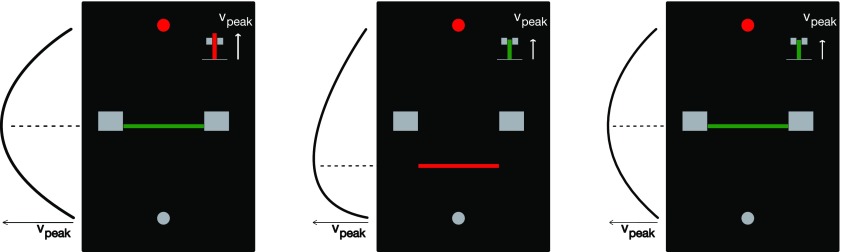
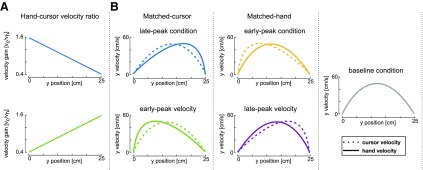
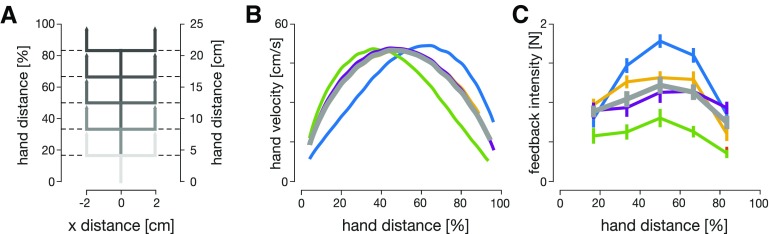
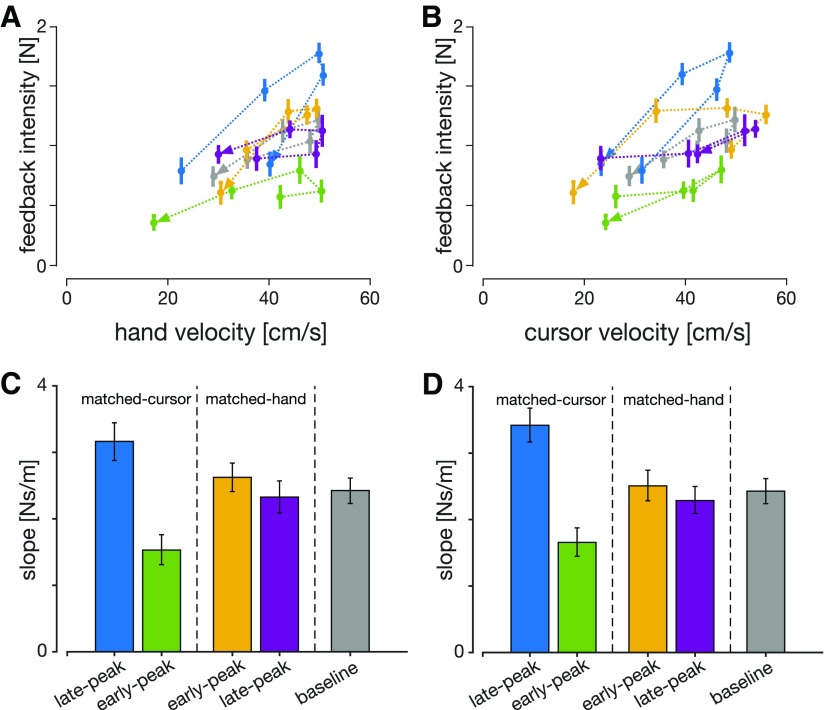
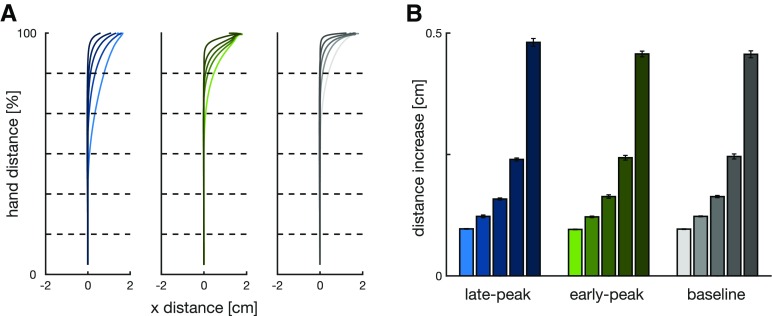
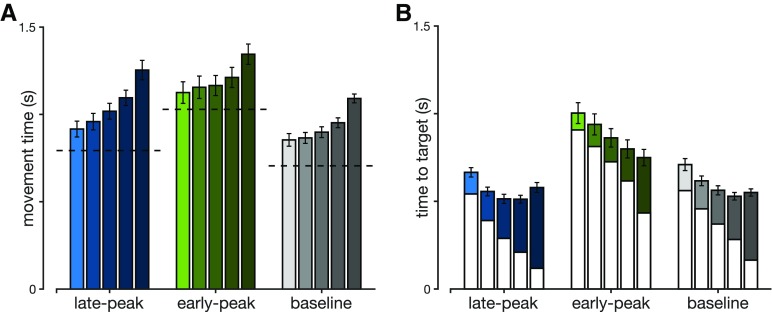
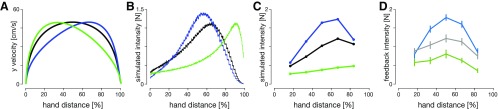
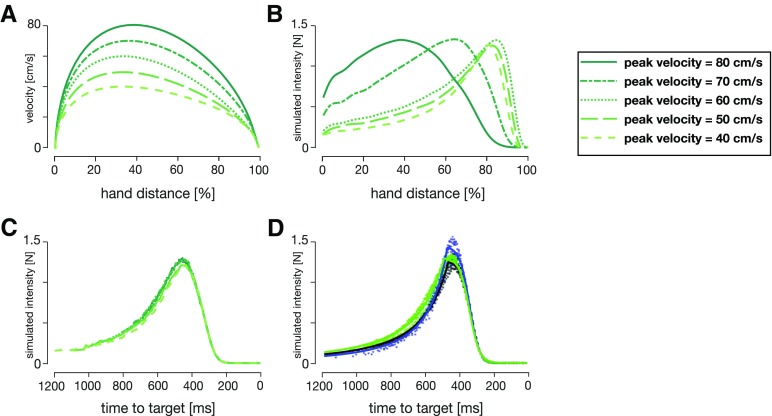
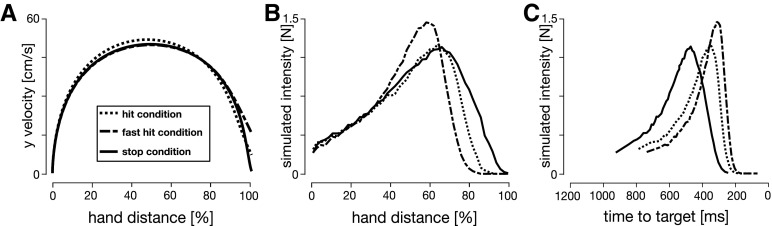
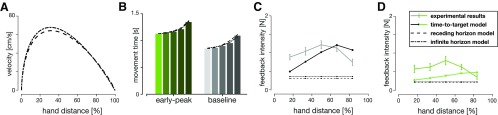
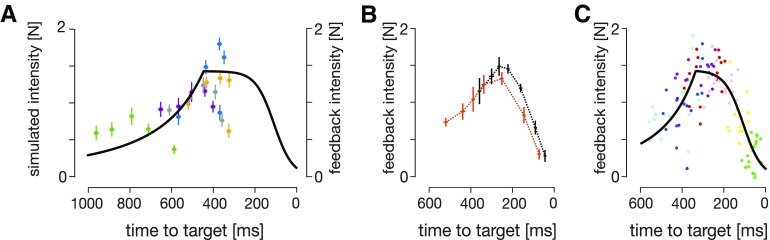
Visuomotor feedback responses vary in intensity throughout a reach, commonly explained by optimal control. Here, we show that the optimal control for a range of movements with the same goal can be simplified to a time-to-target dependent control scheme. We measure our human participants' visuomotor responses in five reaching conditions, each with different hand or cursor kinematics. Participants only produced different feedback responses when these kinematic changes resulted in different times-to-target. We complement our experimental data with a range of finite and non-finite horizon optimal feedback control (OFC) models, finding that the model with time-to-target as one of the input parameters best replicates the experimental data. Overall, this suggests that time-to-target is a critical control parameter in online feedback control. Moreover, we propose that for a specific task and known dynamics, humans can instantly produce a control signal without any additional online computation allowing rapid response onset and close to optimal control.
Keywords: motor control; optimal feedback control; reaching; time-to-target; visuomotor control; visuomotor feedback response.
Copyright © 2020 Česonis and Franklin.
Figures
References
-
- Acerbi L, Ma WJ (2017) Practical Bayesian optimization for model fitting with Bayesian adaptive direct search. Adv Neural Inf Process Syst 30:1836–1846.
MeSH terms
LinkOut - more resources
Full Text Sources