

Multi-responsive hydrogel structures from patterned droplet networks
- PMID: 32221498
- PMCID: PMC7117959
- DOI: 10.1038/s41557-020-0444-1
Multi-responsive hydrogel structures from patterned droplet networks
Abstract
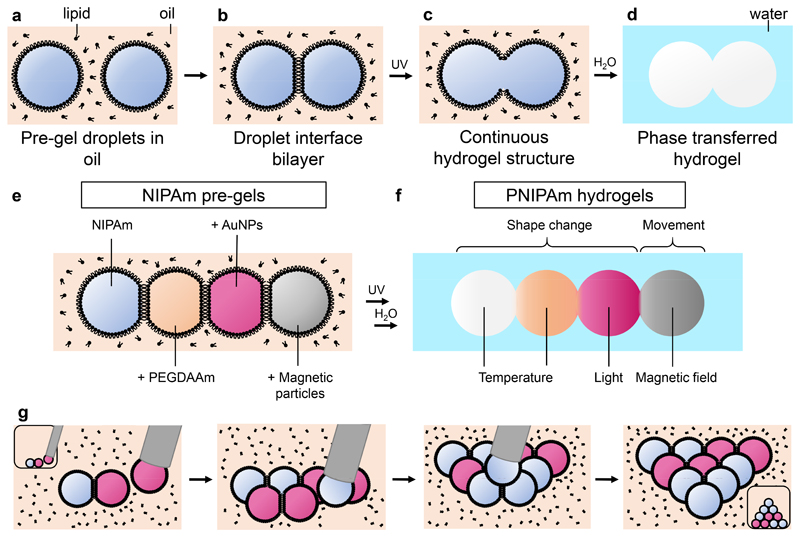
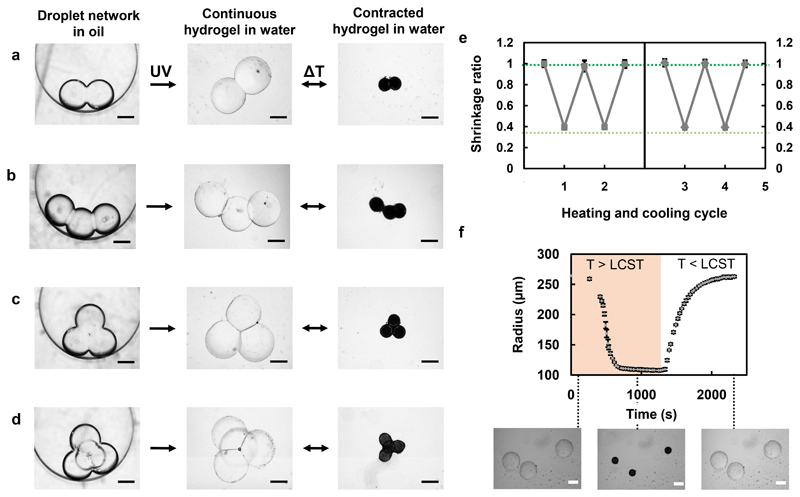
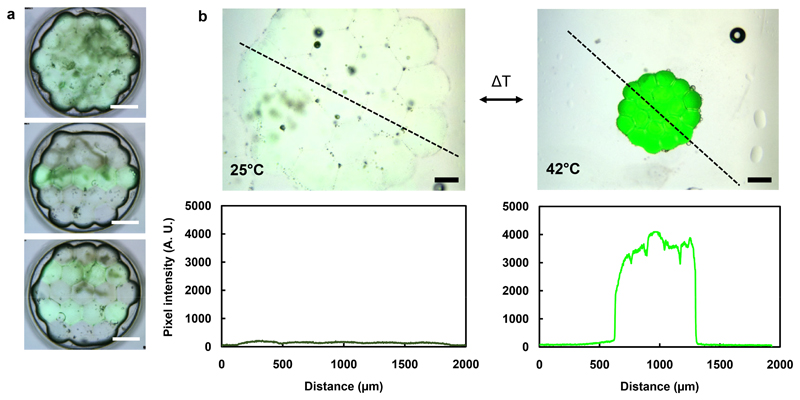
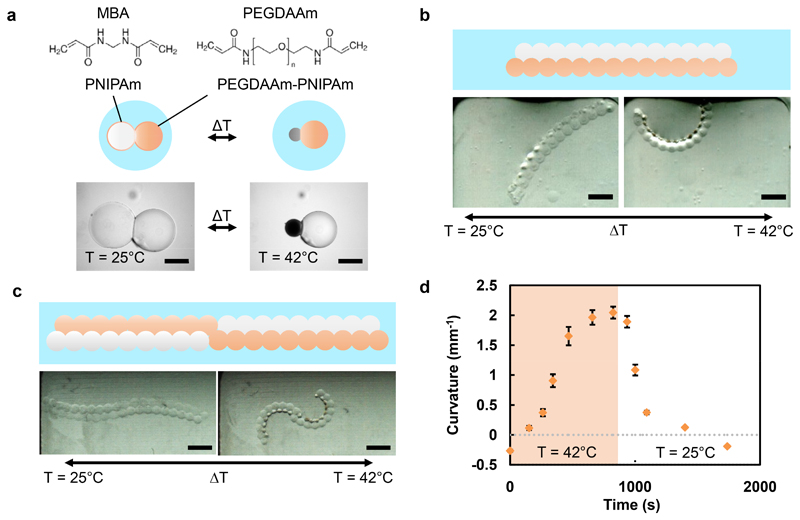
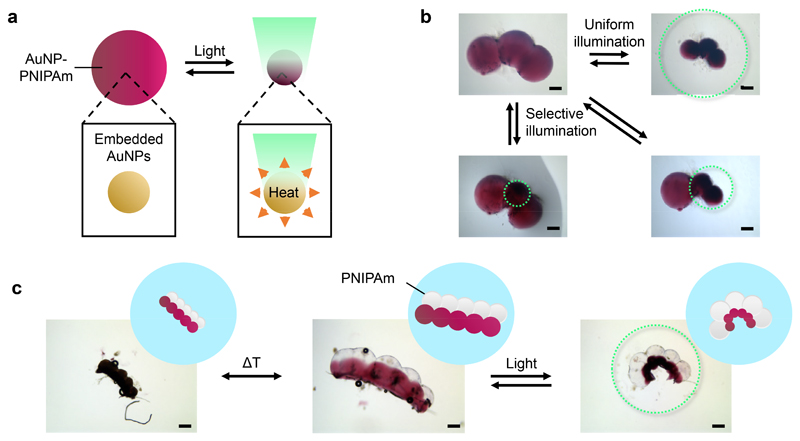
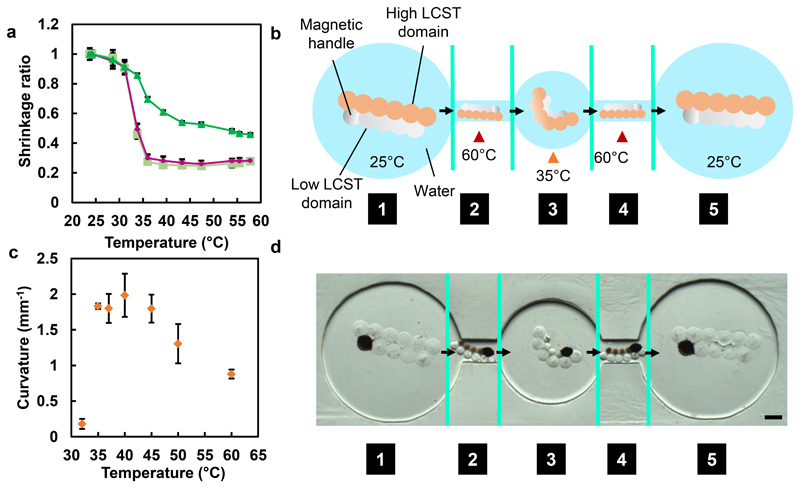
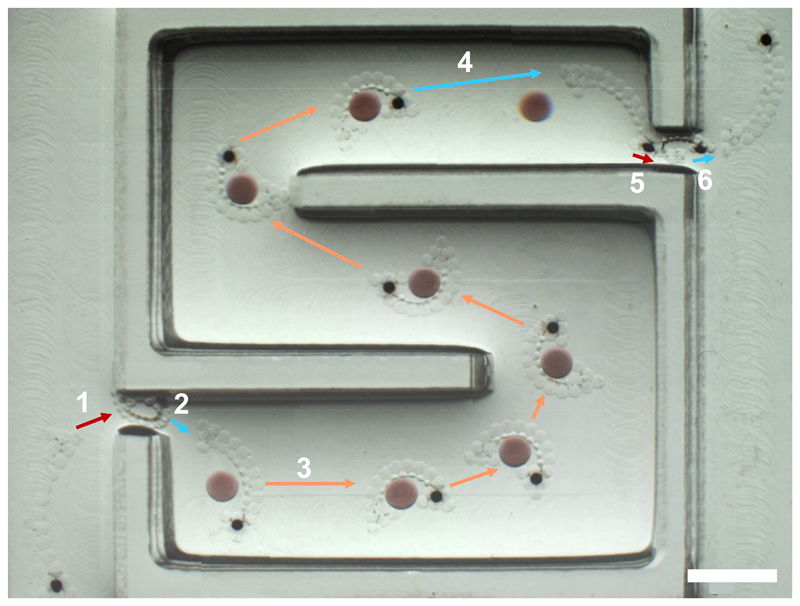
Responsive hydrogels that undergo controlled shape changes in response to a range of stimuli are of interest for microscale soft robotic and biomedical devices. However, these applications require fabrication methods capable of preparing complex, heterogeneous materials. Here we report a new approach for making patterned, multi-material and multi-responsive hydrogels, on a micrometre to millimetre scale. Nanolitre aqueous pre-gel droplets were connected through lipid bilayers in predetermined architectures and photopolymerized to yield continuous hydrogel structures. By using this droplet network technology to pattern domains containing temperature-responsive or non-responsive hydrogels, structures that undergo reversible curling were produced. Through patterning of gold nanoparticle-containing domains into the hydrogels, light-activated shape change was achieved, while domains bearing magnetic particles allowed movement of the structures in a magnetic field. To highlight our technique, we generated a multi-responsive hydrogel that, at one temperature, could be moved through a constriction under a magnetic field and, at a second temperature, could grip and transport a cargo.
Conflict of interest statement
Hagan Bayley is the Founder of, a Director of, a share-holder of and a consultant for OxSyBio, a company engaged in the development of printed tissues and tissue-like materials.
Figures
Comment in
-
Precise patterning driven by droplets.Nat Chem. 2020 Apr;12(4):328-330. doi: 10.1038/s41557-020-0449-9. Nat Chem. 2020. PMID: 32221499 No abstract available.
References
-
- Hu W, Lum GZ, Mastrangeli M, Sitti M. Small-scale soft-bodied robot with multimodal locomotion. Nature. 2018;554:81–85. - PubMed
-
- Zhou Y, Hauser AW, Bende NP, Kuzyk MG, Hayward RC. Waveguiding Microactuators Based on a Photothermally Responsive Nanocomposite Hydrogel. Adv Funct Mater. 2016;26:5447–5452.
Publication types
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
