

Mechanotactile Sensory Feedback Improves Embodiment of a Prosthetic Hand During Active Use
- PMID: 32273838
- PMCID: PMC7113400
- DOI: 10.3389/fnins.2020.00263
Mechanotactile Sensory Feedback Improves Embodiment of a Prosthetic Hand During Active Use
Abstract
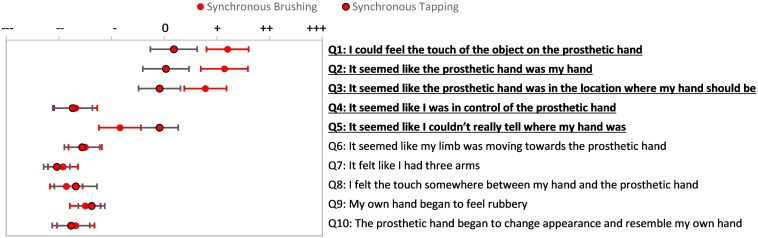
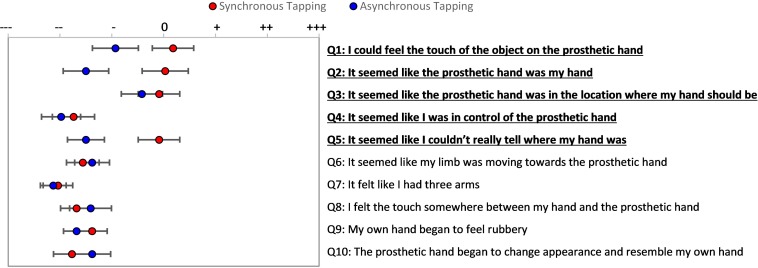
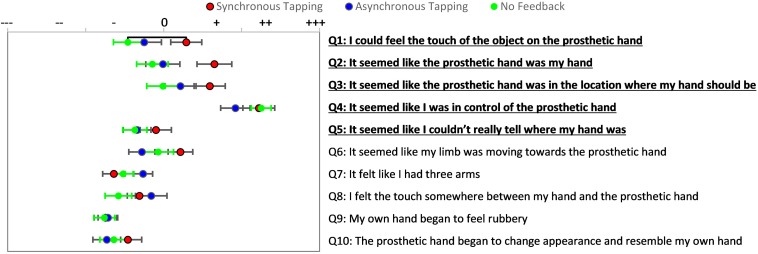
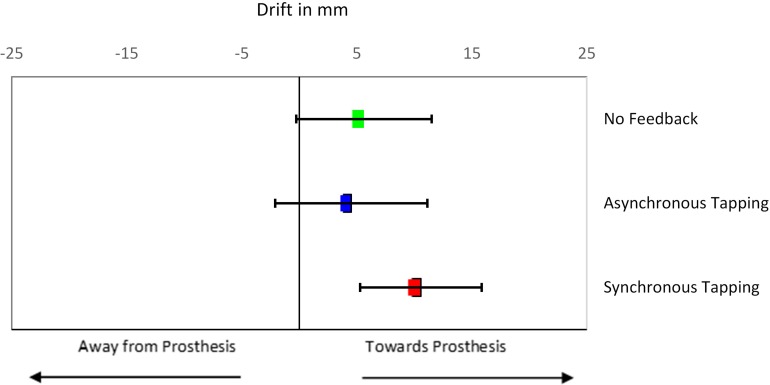
There have been several advancements in the field of myoelectric prostheses to improve dexterity and restore hand grasp patterns for persons with upper limb loss, including robust control strategies, novel sensory feedback, and multifunction prosthetic terminal devices. Although these advancements have shown to improve prosthesis performance, a key element that may further improve acceptance is often overlooked. Embodiment, which encompasses the feeling of owning, controlling and locating the device without the need to constantly look at it, has been shown to be affected by sensory feedback. However, the specific aspects of embodiment that are influenced are not clearly understood, particularly when a prosthesis is actively controlled. In this work, we used a sensorized simulated prosthesis in able-bodied participants to investigate the contribution of sensory feedback, active motor control, and the combination of both to the components of embodiment; using a common methodology in the literature, namely the rubber hand illusion (RHI). Our results indicate that (1) the sensorized simulated prosthesis may be embodied by able-bodied users in a similar fashion as prosthetic devices embodied by persons with upper limb amputation, and (2) mechanotactile sensory feedback might not only be useful for improving certain aspects of embodiment, i.e., ownership and location, but also may have a modulating effect on other aspects, namely sense of agency, when provided asynchronously during active motor control tasks. This work may allow us to further investigate and manipulate factors contributing to the complex phenomenon of embodiment in relation to active motor control of a device, enabling future study of more precise quantitative measures of embodiment that do not rely as much on subjective perception.
Keywords: electromyography; embodiment; motor learning; prosthetics; rubber hand illusion; sensory feedback; simulated prosthesis.
Copyright © 2020 Shehata, Rehani, Jassat and Hebert.
Figures
References
-
- Belter J. T., Segil J. L., Dollar A. M., Weir R. F. (2013). Mechanical design and performance specifications of anthropomorphic prosthetic hands: a review. J. Rehabil. Res. Dev. 50 599–618. - PubMed
LinkOut - more resources
Full Text Sources