

Climbing Escher's stairs: A way to approximate stability landscapes in multidimensional systems
- PMID: 32275714
- PMCID: PMC7176285
- DOI: 10.1371/journal.pcbi.1007788
Climbing Escher's stairs: A way to approximate stability landscapes in multidimensional systems
Abstract
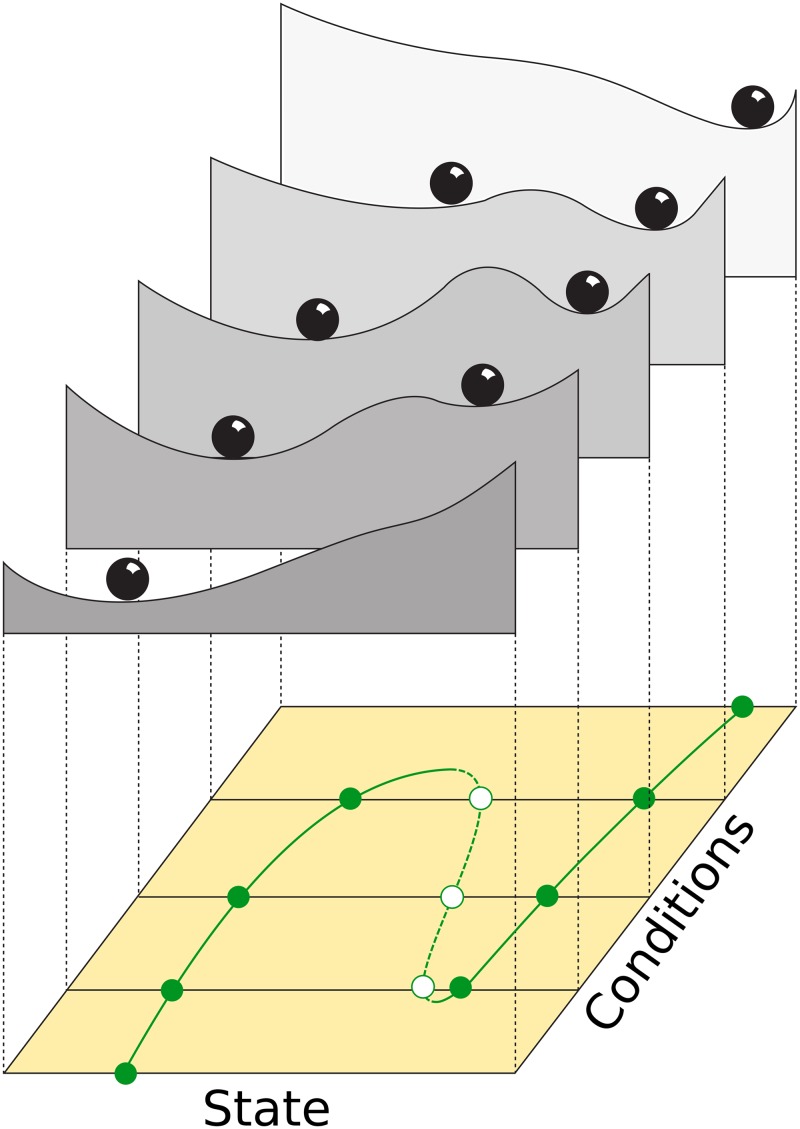
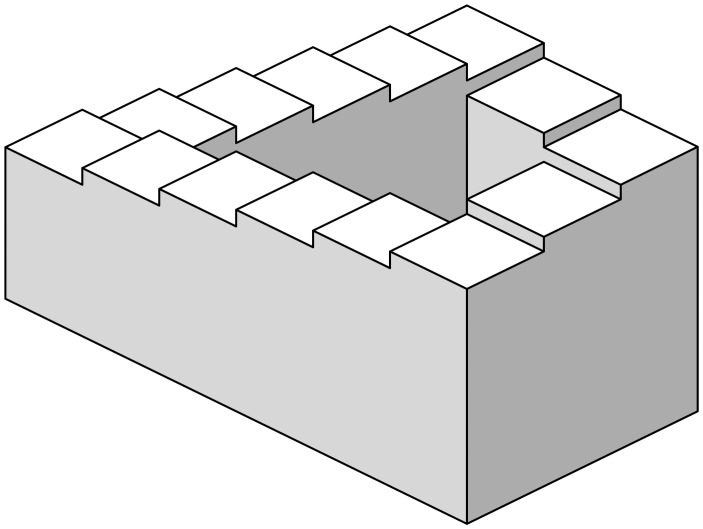
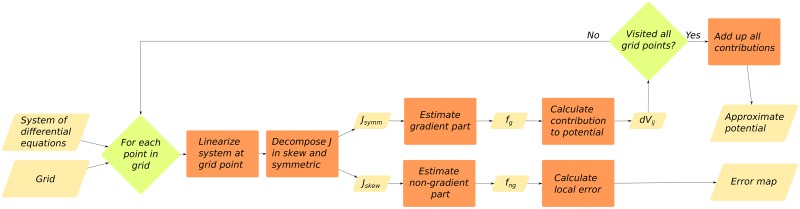
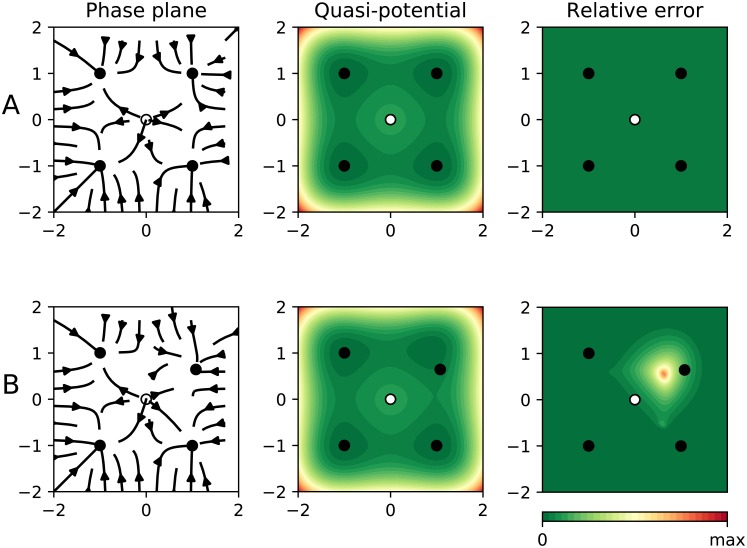
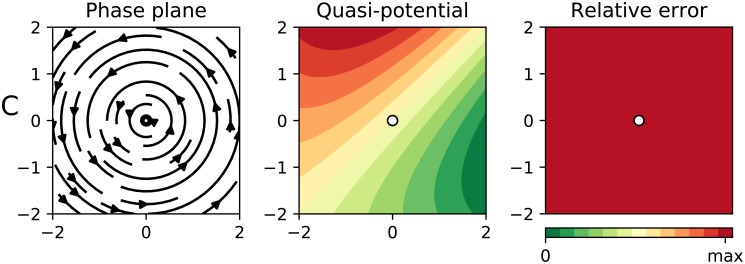
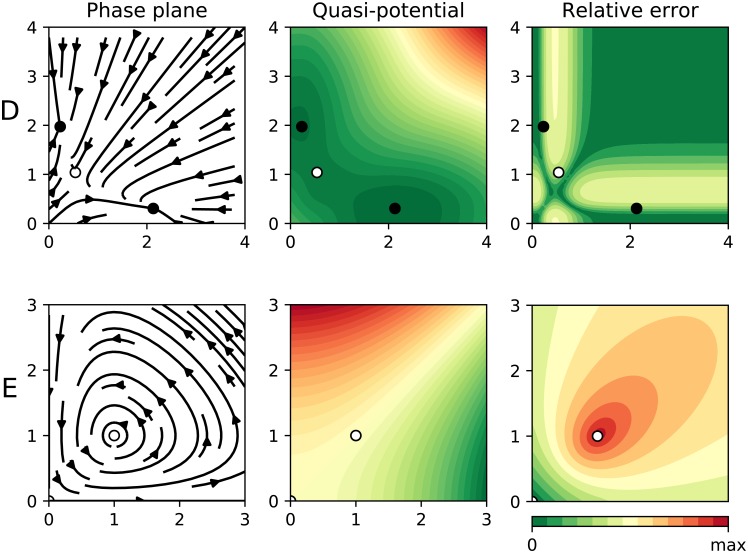
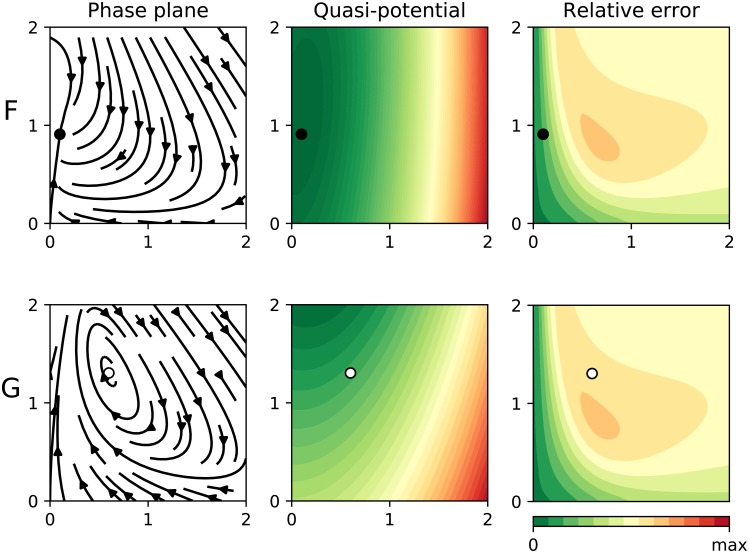
Stability landscapes are useful for understanding the properties of dynamical systems. These landscapes can be calculated from the system's dynamical equations using the physical concept of scalar potential. Unfortunately, it is well known that for most systems with two or more state variables such potentials do not exist. Here we use an analogy with art to provide an accessible explanation of why this happens and briefly review some of the possible alternatives. Additionally, we introduce a novel and simple computational tool that implements one of those solutions: the decomposition of the differential equations into a gradient term, that has an associated potential, and a non-gradient term, that lacks it. In regions of the state space where the magnitude of the non-gradient term is small compared to the gradient part, we use the gradient term to approximate the potential as quasi-potential. The non-gradient to gradient ratio can be used to estimate the local error introduced by our approximation. Both the algorithm and a ready-to-use implementation in the form of an R package are provided.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures
References
-
- Edelstein-Keshet L. Mathematical Models in Biology [Internet]. Society for Industrial; Applied Mathematics; 1988.
-
- Strogatz SH. Nonlinear Dynamics And Chaos: With Applications To Physics, Biology, Chemistry And Engineering. 1994. p. 512.
-
- Beisner B, Haydon D, Cuddington K. Alternative stable states in ecology Frontiers in Ecology and the Environment. John Wiley & Sons, Ltd; 2003;1: 376–382.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
