

ChemOS: An orchestration software to democratize autonomous discovery
- PMID: 32298284
- PMCID: PMC7161969
- DOI: 10.1371/journal.pone.0229862
ChemOS: An orchestration software to democratize autonomous discovery
Abstract
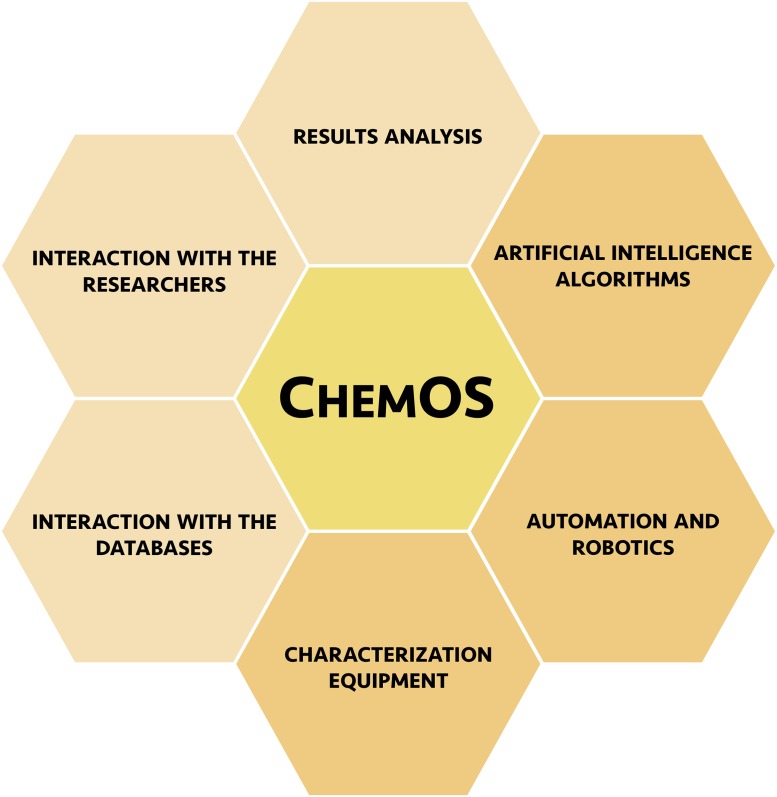
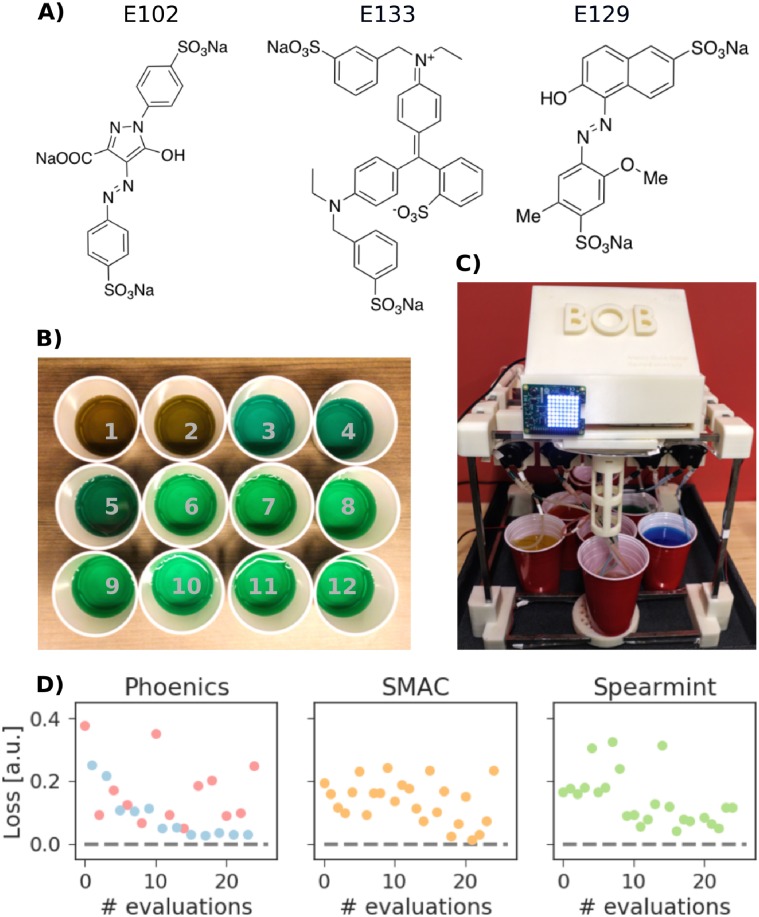
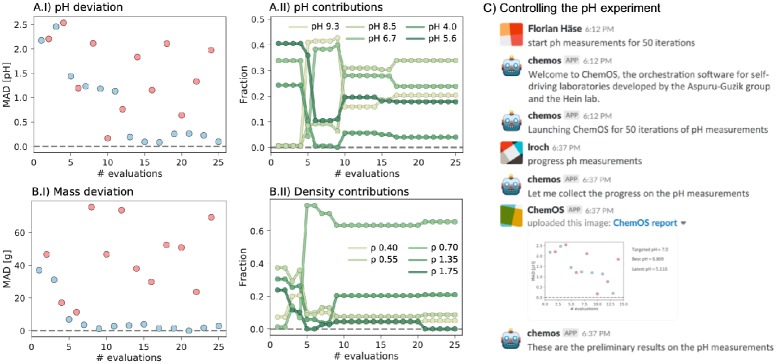
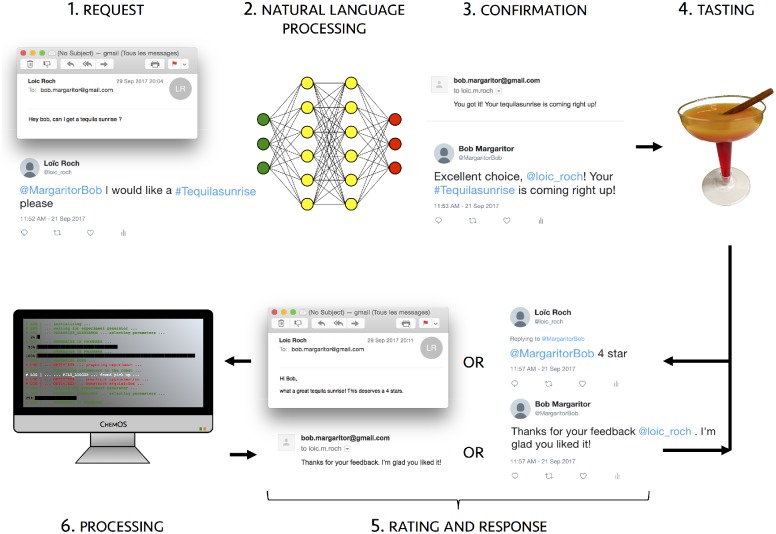
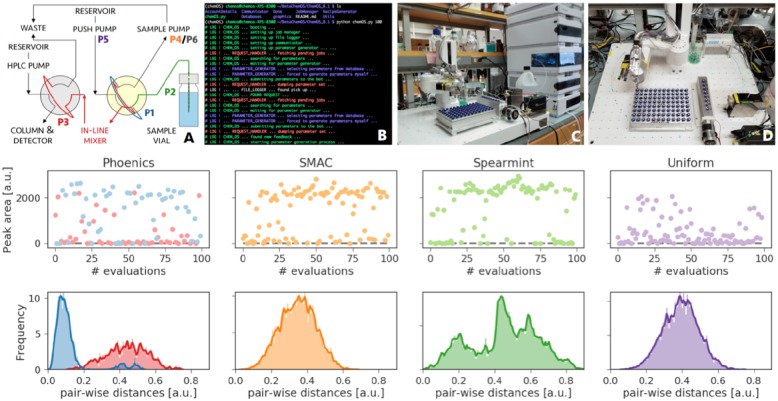
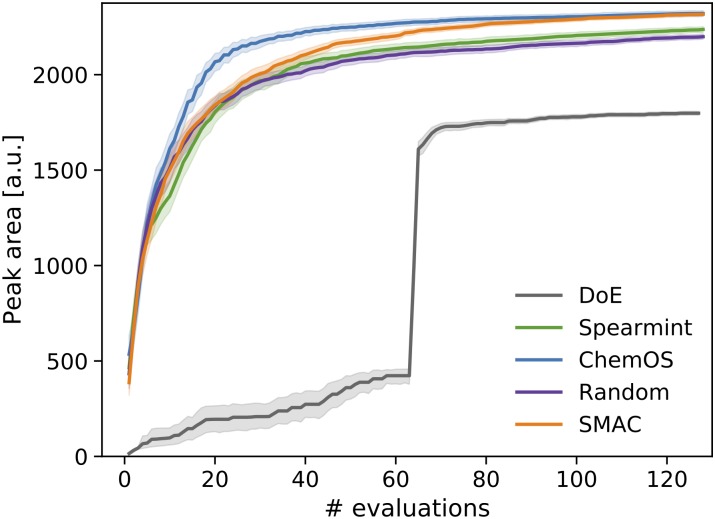
The current Edisonian approach to discovery requires up to two decades of fundamental and applied research for materials technologies to reach the market. Such a slow and capital-intensive turnaround calls for disruptive strategies to expedite innovation. Self-driving laboratories have the potential to provide the means to revolutionize experimentation by empowering automation with artificial intelligence to enable autonomous discovery. However, the lack of adequate software solutions significantly impedes the development of self-driving laboratories. In this paper, we make progress towards addressing this challenge, and we propose and develop an implementation of ChemOS; a portable, modular and versatile software package which supplies the structured layers necessary for the deployment and operation of self-driving laboratories. ChemOS facilitates the integration of automated equipment, and it enables remote control of automated laboratories. ChemOS can operate at various degrees of autonomy; from fully unsupervised experimentation to actively including inputs and feedbacks from researchers into the experimentation loop. The flexibility of ChemOS provides a broad range of functionality as demonstrated on five applications, which were executed on different automated equipment, highlighting various aspects of the software package.
Conflict of interest statement
We acknowledge receiving funding from two commercial sources (Tata Sons Limited and North Robotics) and state herein that this does not alter our adherence to PLOS ONE policies on sharing data and materials. Author A.A.G is affiliated with Vector Institute for Artificial Intelligence and we state herein that this does not alter our adherence to PLOS ONE policies on sharing data and materials.
Figures
References
-
- King RD, Rowland J, Oliver SG, Young M, Aubrey W, Byrne E, et al. The Automation of Science. Science 2009; 342:85. - PubMed
-
- Aspuru-Guzik A, Persson K. Materials Acceleration Platform: Accelerating Advanced Energy Materials Discovery by Integrating High-Throughput Methods and Artificial Intelligence. Canadian Institute for Advanced Research (CIFAR) 2018.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
