

Toward Asymptotically-Optimal Inspection Planning via Efficient Near-Optimal Graph Search
- PMID: 32318619
- PMCID: PMC7172008
- DOI: 10.15607/rss.2019.xv.057
Toward Asymptotically-Optimal Inspection Planning via Efficient Near-Optimal Graph Search
Abstract
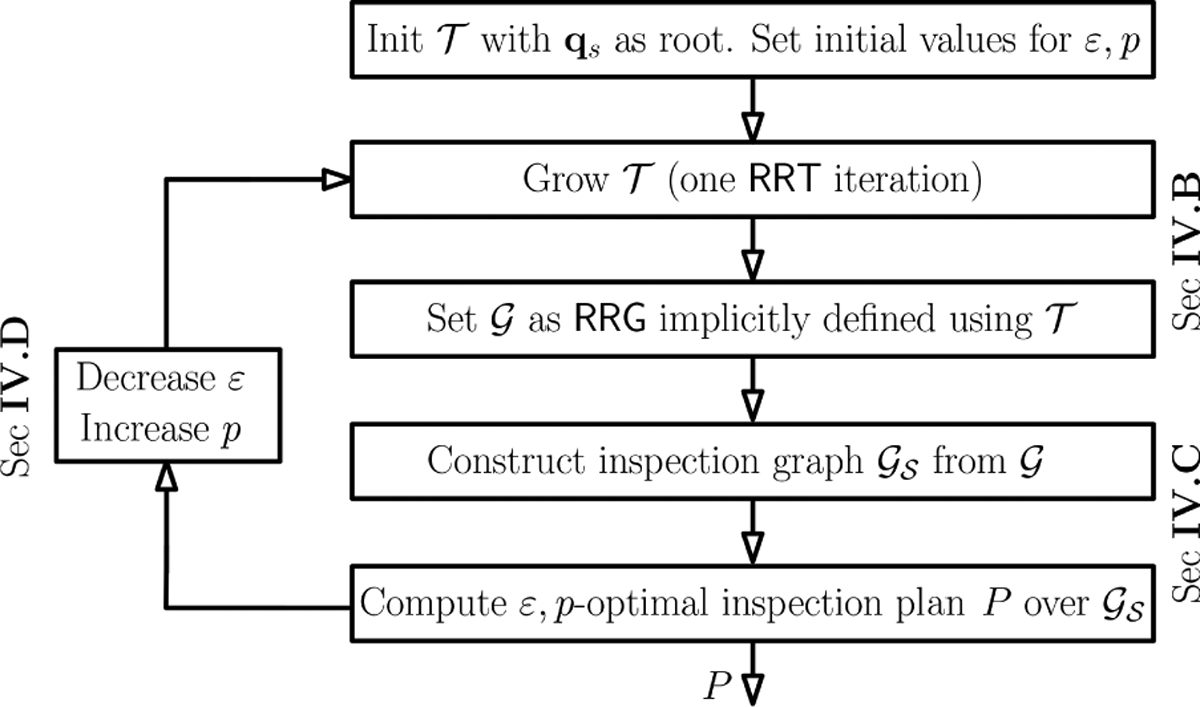
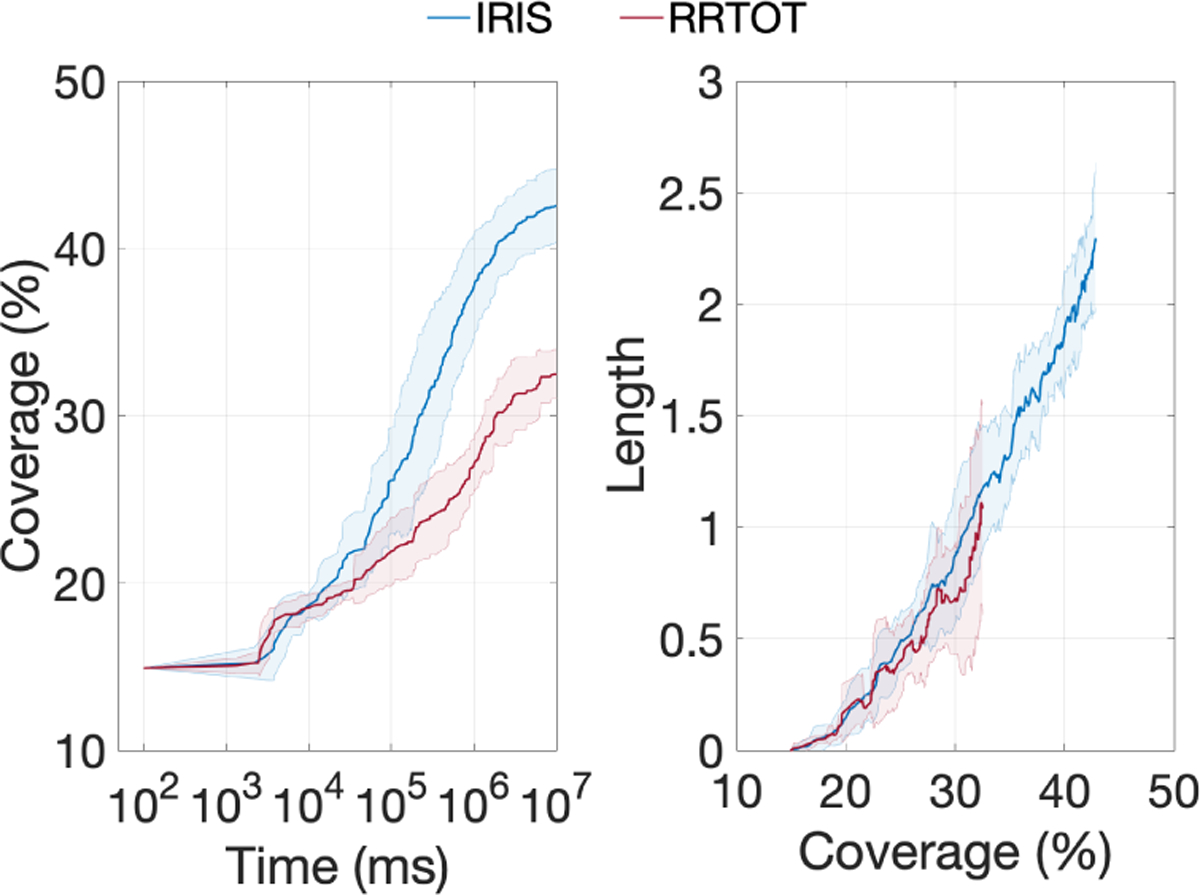
Inspection planning, the task of planning motions that allow a robot to inspect a set of points of interest, has applications in domains such as industrial, field, and medical robotics. Inspection planning can be computationally challenging, as the search space over motion plans grows exponentially with the number of points of interest to inspect. We propose a novel method, Incremental Random Inspection-roadmap Search (IRIS), that computes inspection plans whose length and set of successfully inspected points asymptotically converge to those of an optimal inspection plan. IRIS incrementally densifies a motion planning roadmap using sampling-based algorithms, and performs efficient near-optimal graph search over the resulting roadmap as it is generated. We demonstrate IRIS's efficacy on a simulated planar 5DOF manipulator inspection task and on a medical endoscopic inspection task for a continuum parallel surgical robot in cluttered anatomy segmented from patient CT data. We show that IRIS computes higher-quality inspection plans orders of magnitudes faster than a prior state-of-the-art method.
Figures






References
-
- Almadhoun Randa, Taha Tarek, Seneviratne Lakmal, Dias Jorge, and Cai Guowei. A survey on inspecting structures using robotic systems. Int. J. Advanced Robotic Systems, 13(6), 2016.
-
- Bingham Brian, Foley Brendan, Singh Hanumant, Camilli Richard, Delaporta Katerina, Eustice Ryan, Mallios Angelos, Mindell David, Roman Christopher, and Sakellariou Dimitris. Robotic Tools for Deep Water Archaeology: Surveying an Ancient Shipwreck with an Autonomous Underwater Vehicle. J. of Field Robotics, 27(6):702–717, 2010.
-
- Bircher Andreas, Alexis Kostas, Burri Michael, Oettershagen Philipp, Omari Sammy, Mantel Thomas, and Siegwart Roland. Structural Inspection Path Planning via Iterative Viewpoint Resampling with Application to Aerial Robotics In IEEE Int. Conf. Robotics and Automation (ICRA), pages 6423–6430. IEEE, 2015.
-
- Bircher Andreas, Kamel Mina, Alexis Kostas, Burri Michael, Oettershagen Philipp, Omari Sammy, Mantel Thomas, and Siegwart Roland. Three-dimensional coverage path planning via viewpoint resampling and tour optimization for aerial robots. Autonomous Robots, 40 (6):1059–1078, 2016.
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources