

Ultrasound 3D reconstruction of malignant masses in robotic-assisted partial nephrectomy using the PAF rail system: a comparison study
- PMID: 32385597
- PMCID: PMC7316668
- DOI: 10.1007/s11548-020-02149-4
Ultrasound 3D reconstruction of malignant masses in robotic-assisted partial nephrectomy using the PAF rail system: a comparison study
Abstract
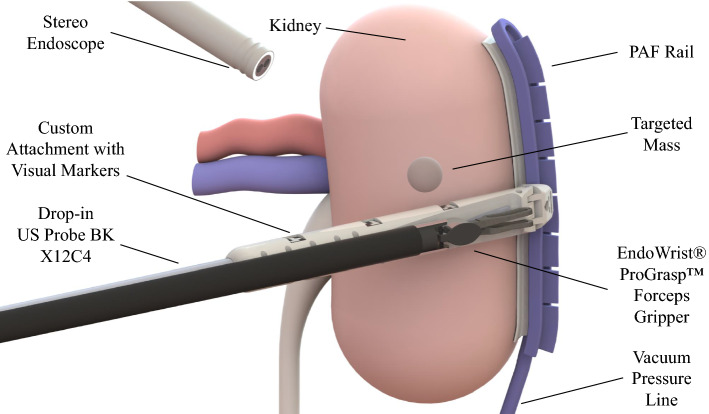
Purpose: In robotic-assisted partial nephrectomy (RAPN), the use of intraoperative ultrasound (IOUS) helps to localise and outline the tumours as well as the blood vessels within the kidney. The aim of this work is to evaluate the use of the pneumatically attachable flexible (PAF) rail system for US 3D reconstruction of malignant masses in RAPN. The PAF rail system is a novel device developed and previously presented by the authors to enable track-guided US scanning.
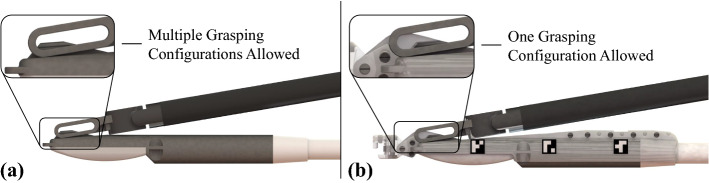
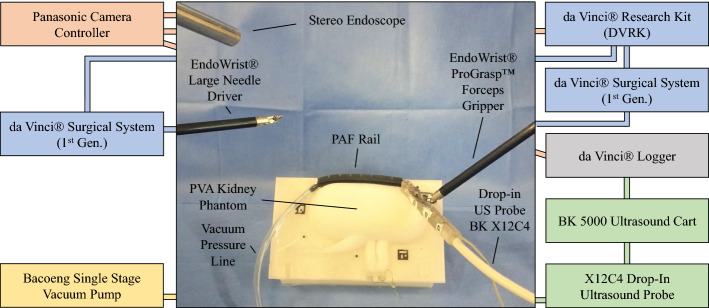
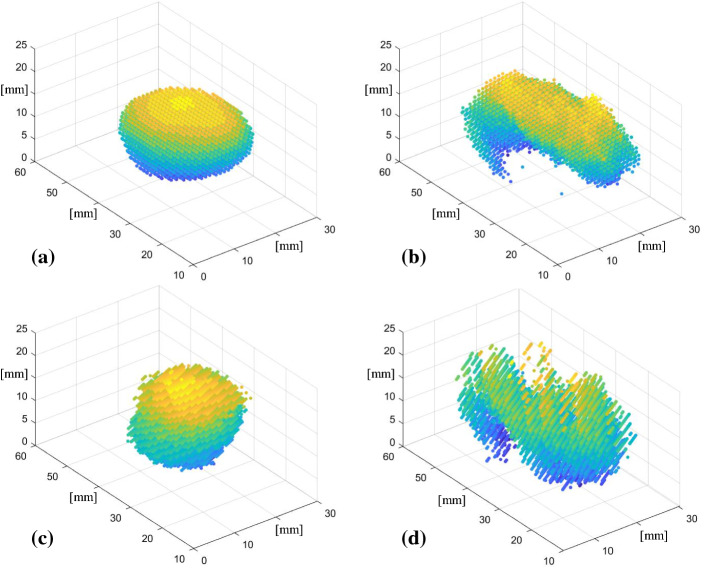
Methods: We present a comparison study between US 3D reconstruction of masses based on: the da Vinci Surgical System kinematics, single- and stereo-camera tracking of visual markers embedded on the probe. An US-realistic kidney phantom embedding a mass is used for testing. A new design for the US probe attachment to enhance the performance of the kinematic approach is presented. A feature extraction algorithm is proposed to detect the margins of the targeted mass in US images.
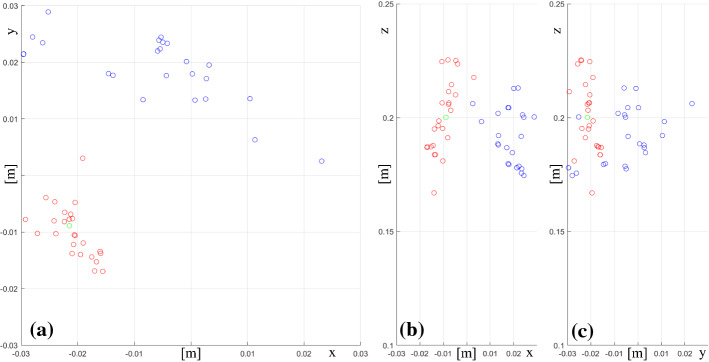
Results: To evaluate the performance of the investigated approaches the resulting 3D reconstructions have been compared to a CT scan of the phantom. The data collected indicates that single camera reconstruction outperformed the other approaches, reconstructing with a sub-millimetre accuracy the targeted mass.
Conclusions: This work demonstrates that the PAF rail system provides a reliable platform to enable accurate US 3D reconstruction of masses in RAPN procedures. The proposed system has also the potential to be employed in other surgical procedures such as hepatectomy or laparoscopic liver resection.
Keywords: 3D ultrasound; Laparoscopy; Soft robotics; Surgical robotics.
Conflict of interest statement
The authors declare that they have no conflict of interest.
Figures
References
-
- Su L-M, Vagvolgyi BP, Agarwal R, Reiley CE, Taylor RH, Hager GD. Augmented reality during robot-assisted laparoscopic partial nephrectomy: toward real-time 3D-CT to stereoscopic video registration. Urology. 2009;73(4):896–900. - PubMed
-
- Shingleton WB, Sewell PE. Percutaneous renal tumor cryoablation with magnetic resonance imaging guidance. J Urol. 2001;165(3):773–776. - PubMed
-
- Kaczmarek BF, Sukumar S, Petros F, Trinh QD, Mander N, Chen R, Menon M, Rogers CG. Robotic ultrasound probe for tumor identification in robotic partial nephrectomy: initial series and outcomes. Int J Urol. 2013;20(2):172–176. - PubMed
-
- Kaneko H, Takagi S, Shiba T. Laparoscopic partial hepatectomy and left lateral segmentectomy: technique and results of a clinical series. Surgery. 1996;120(3):468–475. - PubMed
-
- Ljungberg B, Albiges L, Abu-Ghanem Y, Bensalah K, Dabestani S, Fernández-Pello S, Giles RH, Hofmann F, Hora M, Kuczyk MA. European association of urology guidelines on renal cell carcinoma: the 2019 update. Eur Urol. 2019;75(5):799–810. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
