

Assembly and operation of an open-source, computer numerical controlled (CNC) robot for performing cranial microsurgical procedures
- PMID: 32405052
- PMCID: PMC10276354
- DOI: 10.1038/s41596-020-0318-4
Assembly and operation of an open-source, computer numerical controlled (CNC) robot for performing cranial microsurgical procedures
Abstract
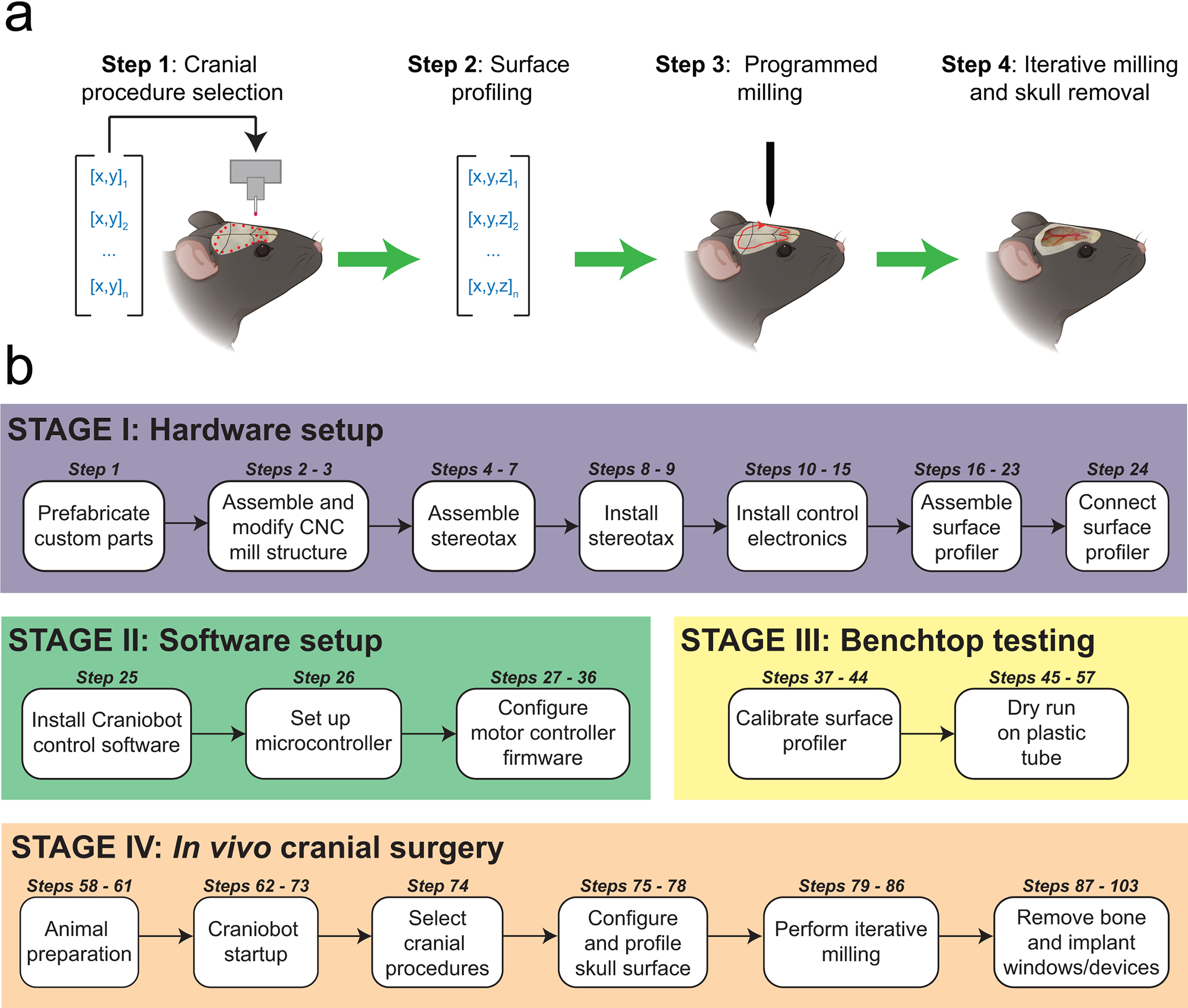
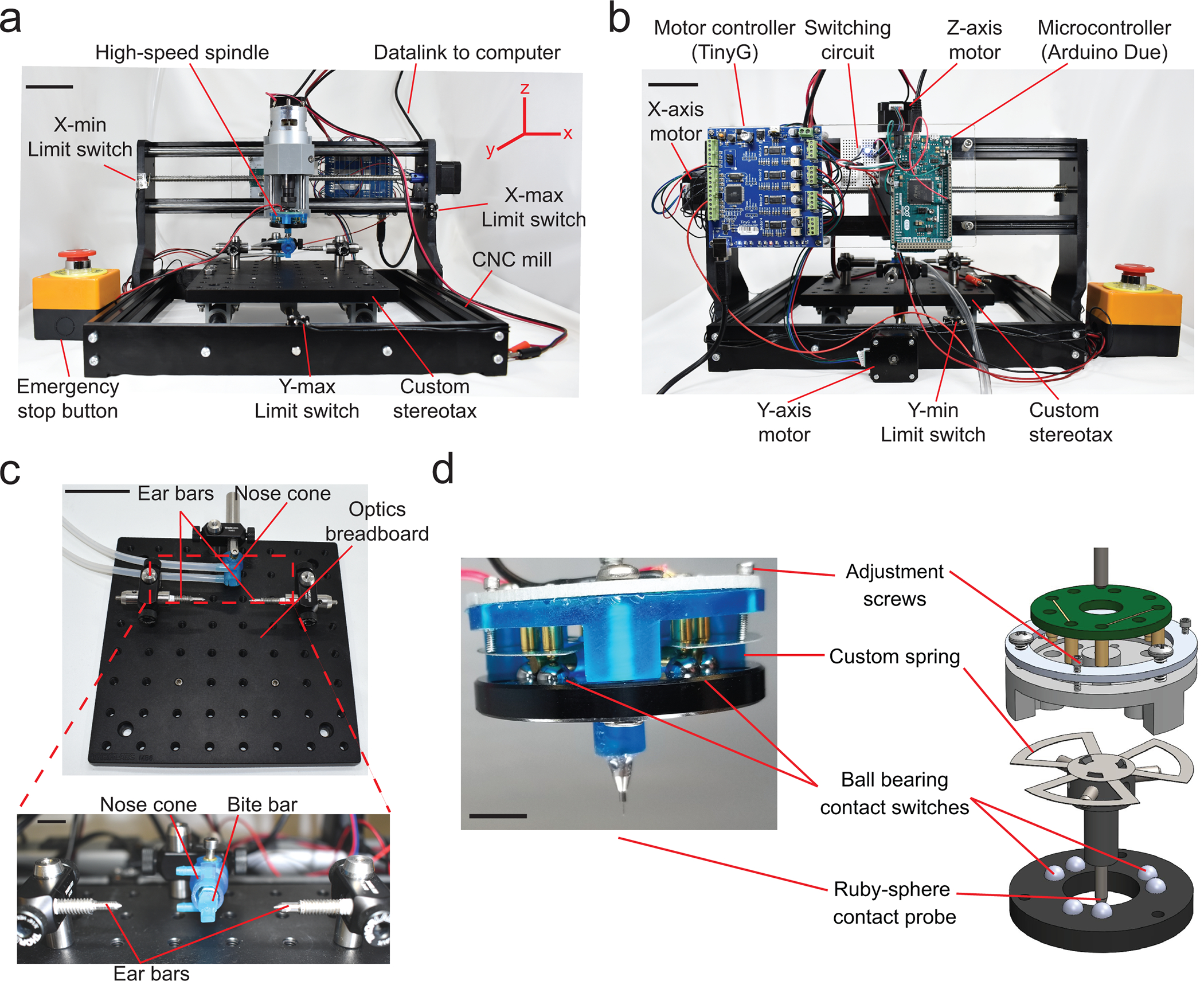
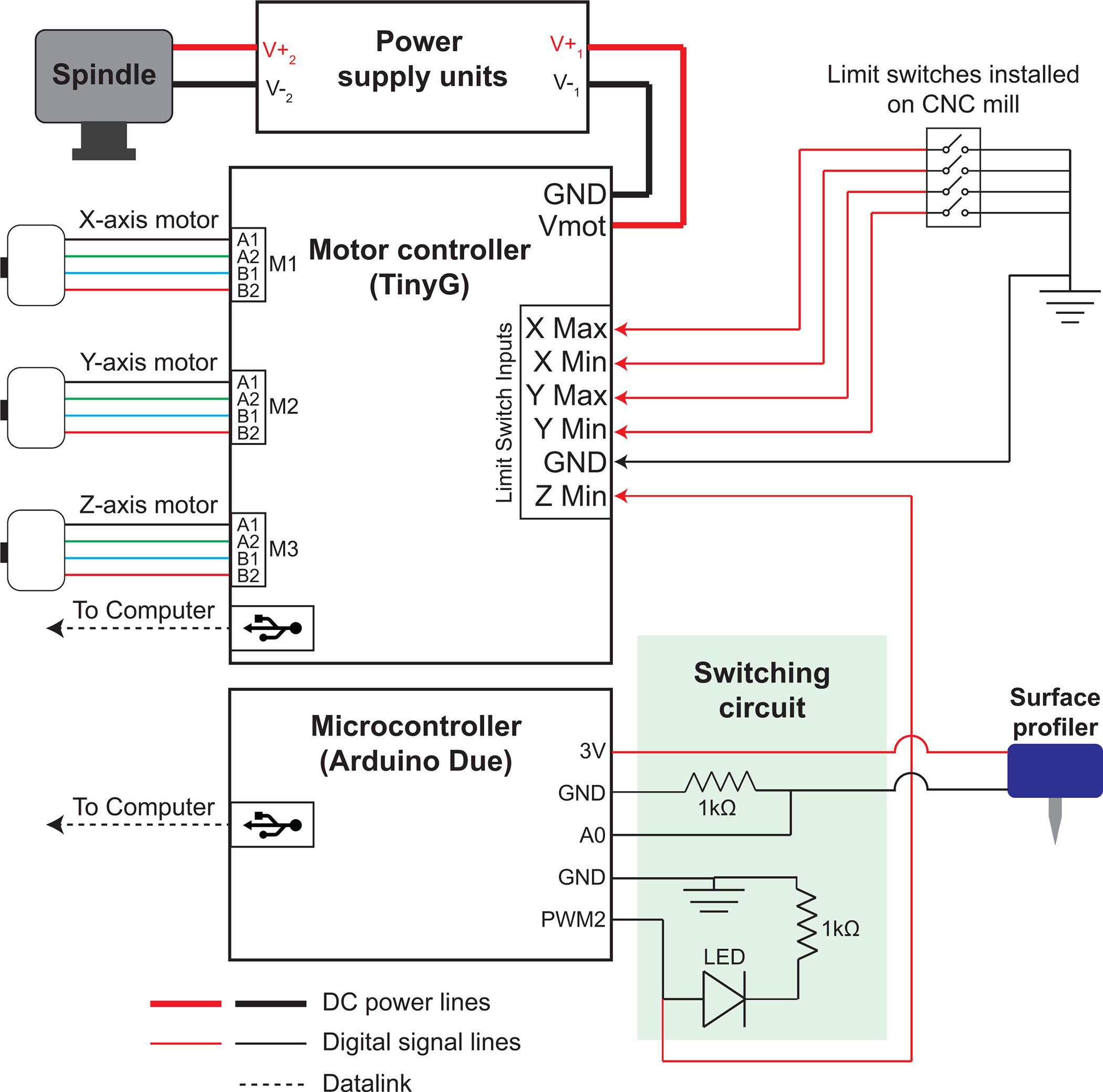
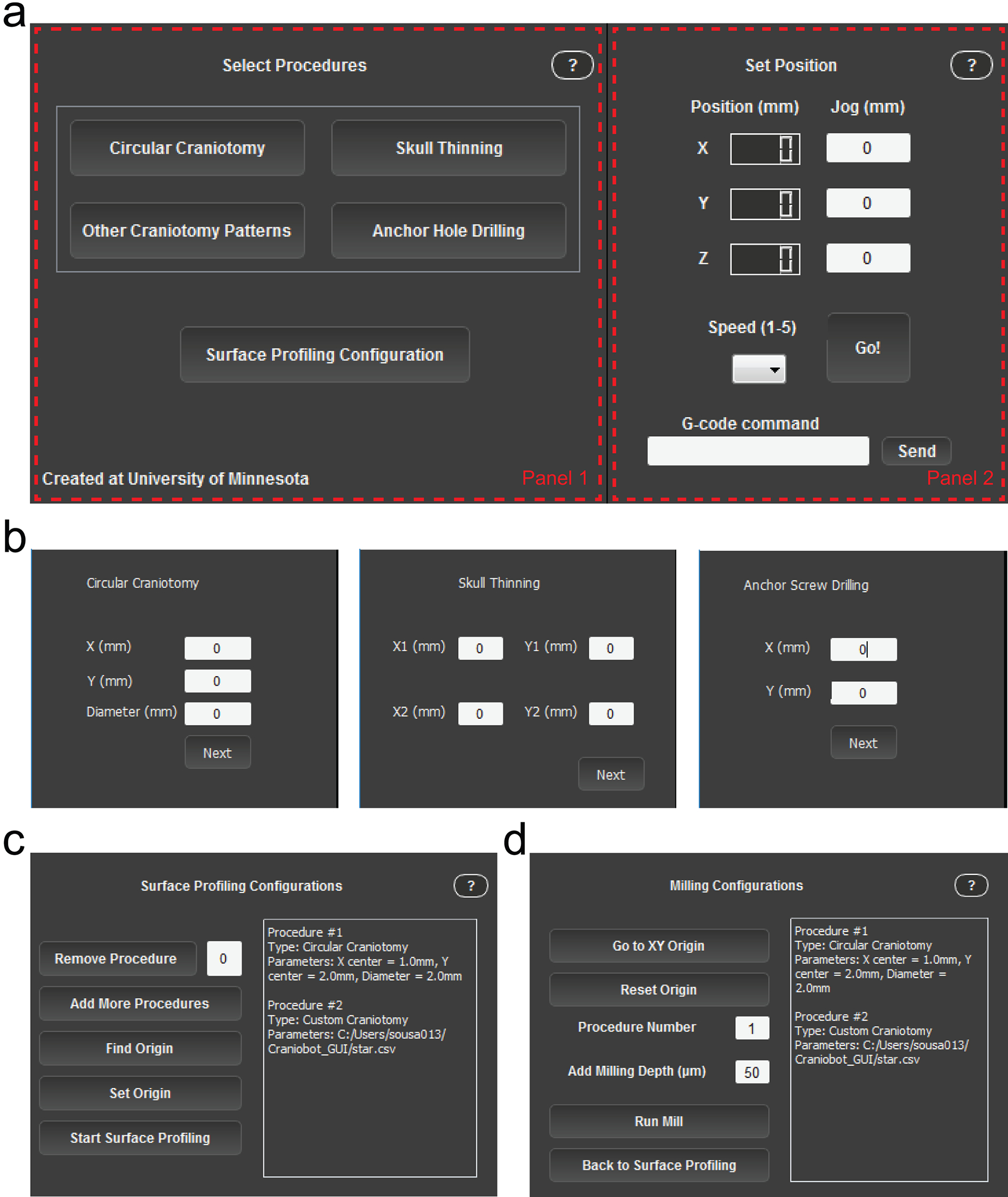
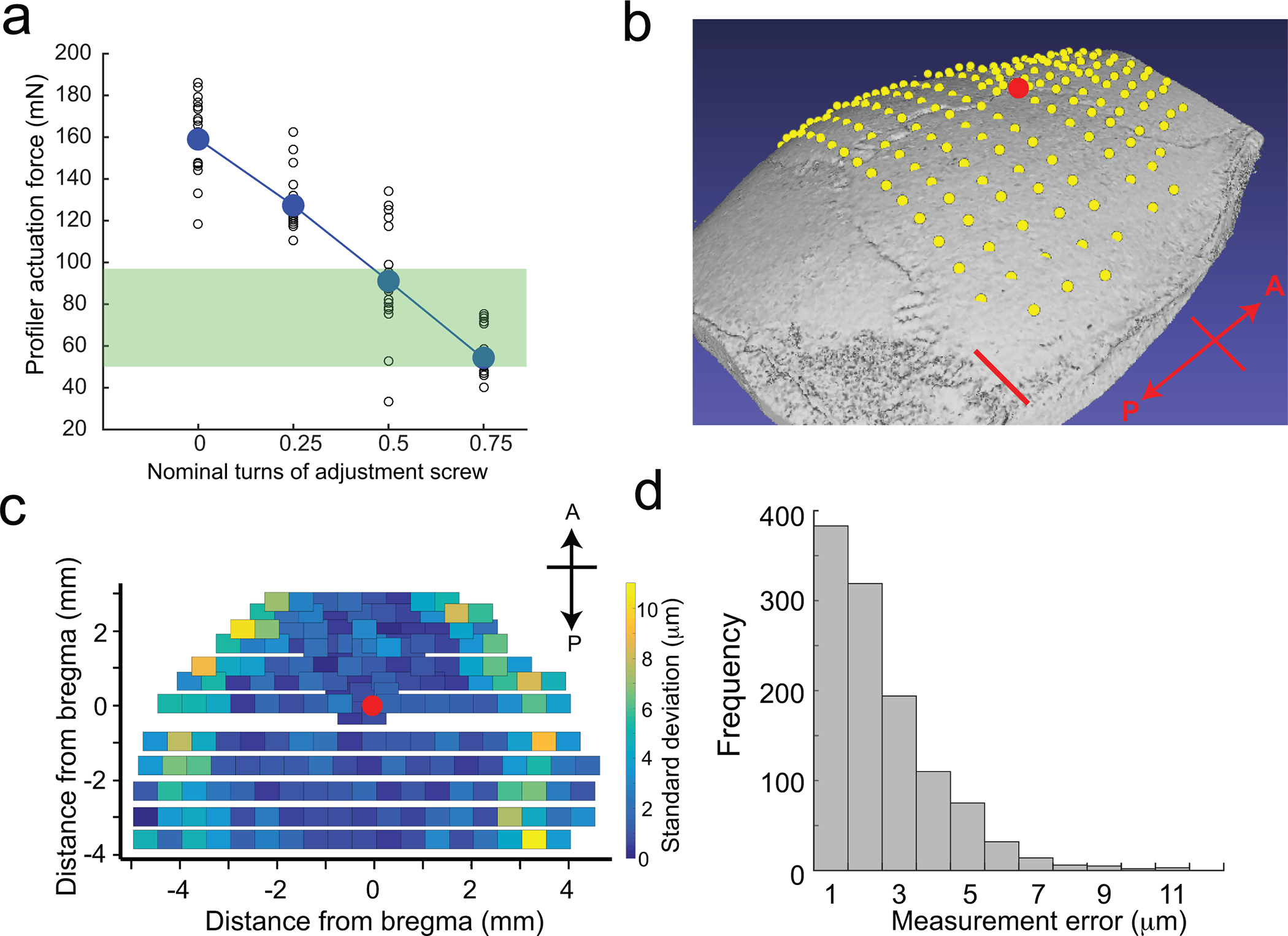
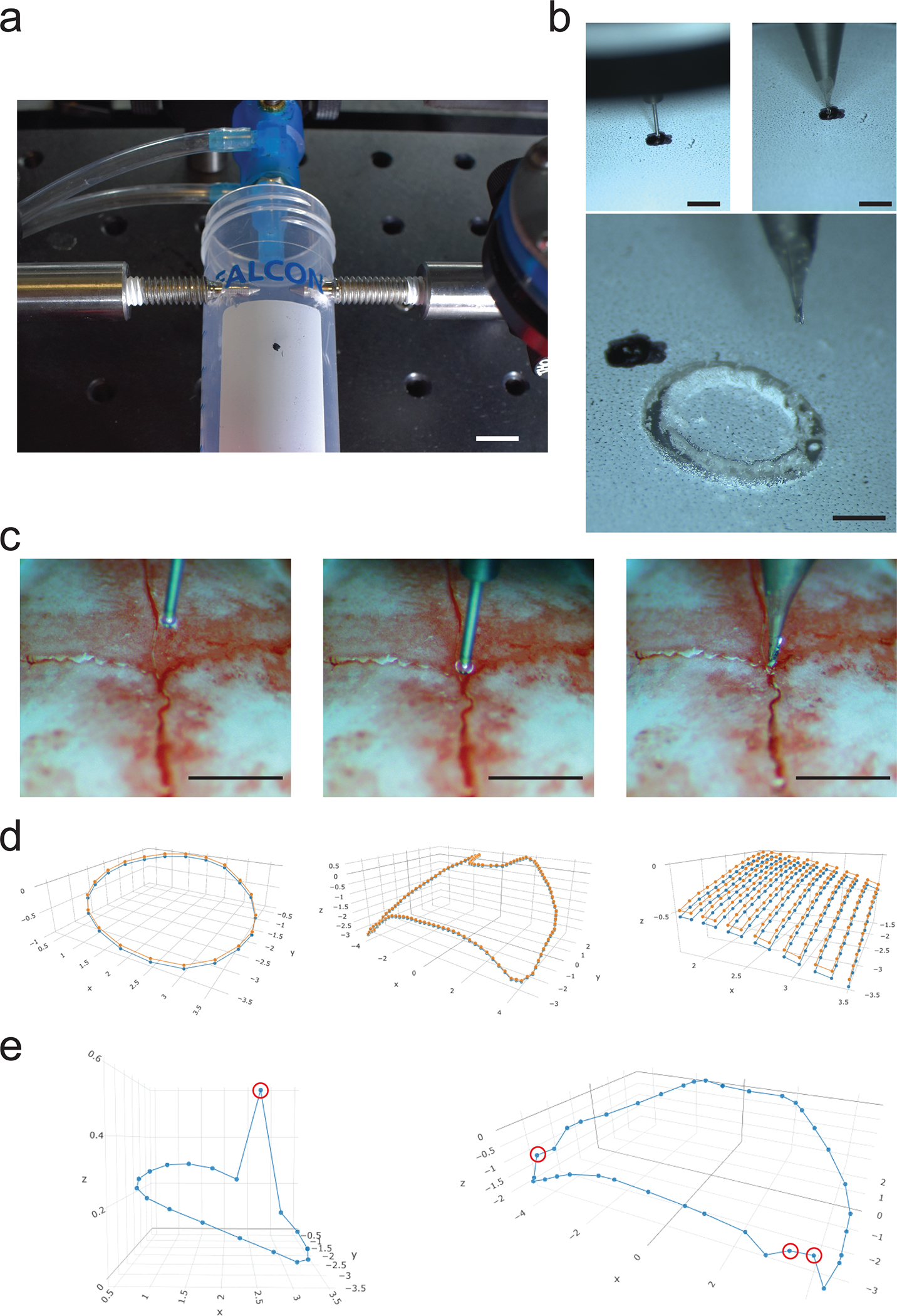
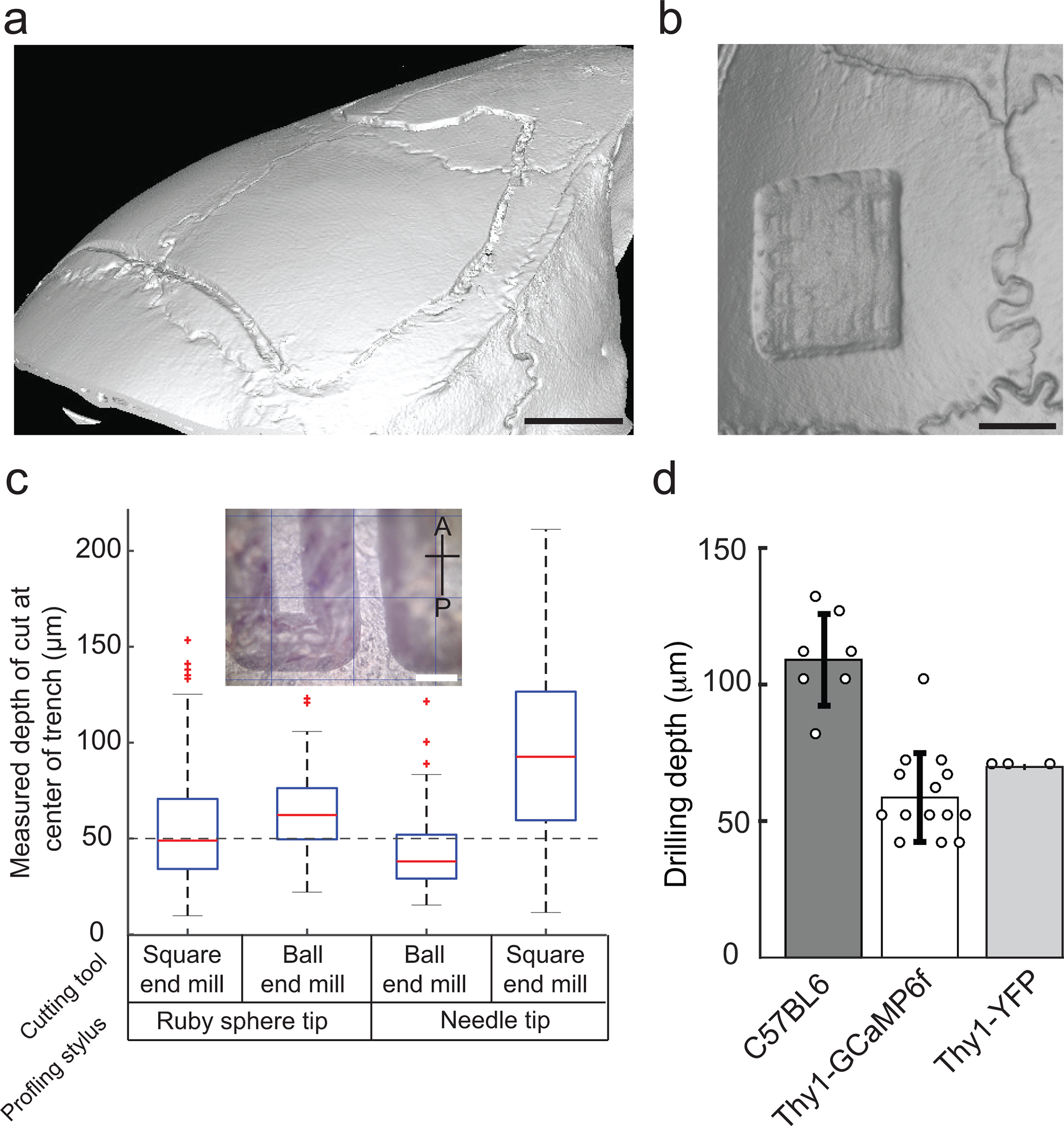
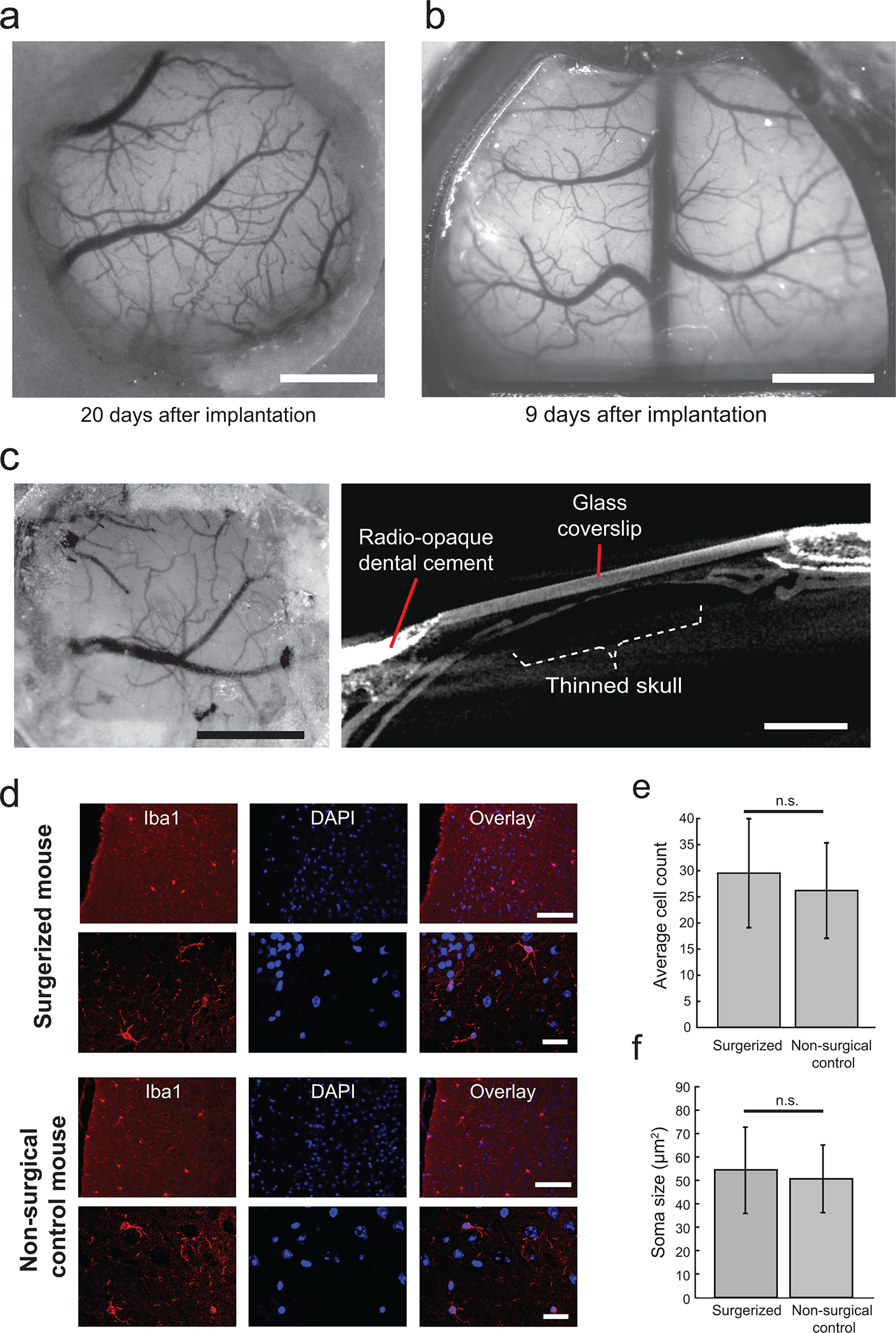
Cranial microsurgery is an essential procedure for accessing the brain through the skull that can be used to introduce neural probes that measure and manipulate neural activity. Neuroscientists have typically used tools such as high-speed drills adapted from dentistry to perform these procedures. As the number of technologies available for neuroscientists has increased, the corresponding cranial microsurgery procedures to deploy them have become more complex. Using a robotic tool that automatically performs these procedures could standardize cranial microsurgeries across neuroscience laboratories and democratize the more challenging procedures. We have recently engineered a robotic surgery platform that utilizes principles of computer numerical control (CNC) machining to perform a wide variety of automated cranial procedures. Here, we describe how to adapt, configure and use an inexpensive desktop CNC mill equipped with a custom-built surface profiler for performing CNC-guided microsurgery on mice. Detailed instructions are provided to utilize this 'Craniobot' for performing circular craniotomies for coverslip implantation, large craniotomies for implanting transparent polymer skulls for cortex-wide imaging access and skull thinning for intact skull imaging. The Craniobot can be set up in <2 weeks using parts that cost <$1,500, and we anticipate that the Craniobot could be easily adapted for use in other small animals.
Conflict of interest statement
COMPETING INTERESTS
The authors declare no competing interests.
Figures
References
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Research Materials
