

An Autonomous Chemical Robot Discovers the Rules of Inorganic Coordination Chemistry without Prior Knowledge
- PMID: 32419277
- PMCID: PMC7384156
- DOI: 10.1002/anie.202000329
An Autonomous Chemical Robot Discovers the Rules of Inorganic Coordination Chemistry without Prior Knowledge
Abstract
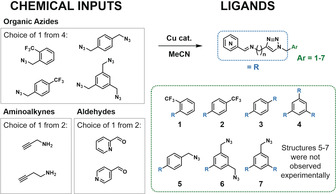
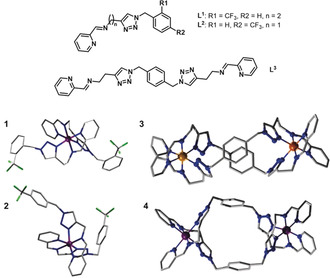
We present a chemical discovery robot for the efficient and reliable discovery of supramolecular architectures through the exploration of a huge reaction space exceeding ten billion combinations. The system was designed to search for areas of reactivity found through autonomous selection of the reagent types, amounts, and reaction conditions aiming for combinations that are reactive. The process consists of two parts where reagents are mixed together, choosing from one type of aldehyde, one amine and one azide (from a possible family of two amines, two aldehydes and four azides) with different volumes, ratios, reaction times, and temperatures, whereby the reagents are passed through a copper coil reactor. Next, either cobalt or iron is added, again from a large number of possible quantities. The reactivity was determined by evaluating differences in pH, UV-Vis, and mass spectra before and after the search was started. The algorithm was focused on the exploration of interesting regions, as defined by the outputs from the sensors, and this led to the discovery of a range of 1-benzyl-(1,2,3-triazol-4-yl)-N-alkyl-(2-pyridinemethanimine) ligands and new complexes: [Fe(L1 )2 ](ClO4 )2 (1); [Fe(L2 )2 ](ClO4 )2 (2); [Co2 (L3 )2 ](ClO4 )4 (3); [Fe2 (L3 )2 ](ClO4 )4 (4), which were crystallised and their structure confirmed by single-crystal X-ray diffraction determination, as well as a range of new supramolecular clusters discovered in solution using high-resolution mass spectrometry.
Keywords: algorithms; artificial intelligence; autonomous discovery robot; supramolecular chemistry.
© 2020 The Authors. Published by Wiley-VCH Verlag GmbH & Co. KGaA.
Conflict of interest statement
The work in this publication has been filed as a patent by the University of Glasgow.
Figures

References
-
- Winpenny R. E. P., J. Chem. Soc. Dalton Trans. 2002, 1, 1–10.
-
- Chung R., Hein J. E., React. Chem. Eng. 2019, 4, 1674–1681.
-
- Clayton A. D., Manson J. A., Taylor C. J., Chamberlain T. W., Taylor B. A., Clemens G., Bourne R. A., React. Chem. Eng. 2019, 4, 1545–1554.
Grants and funding
LinkOut - more resources
Full Text Sources
