

Static Tactile Sensing for a Robotic Electronic Skin via an Electromechanical Impedance-Based Approach
- PMID: 32429364
- PMCID: PMC7288059
- DOI: 10.3390/s20102830
Static Tactile Sensing for a Robotic Electronic Skin via an Electromechanical Impedance-Based Approach
Abstract
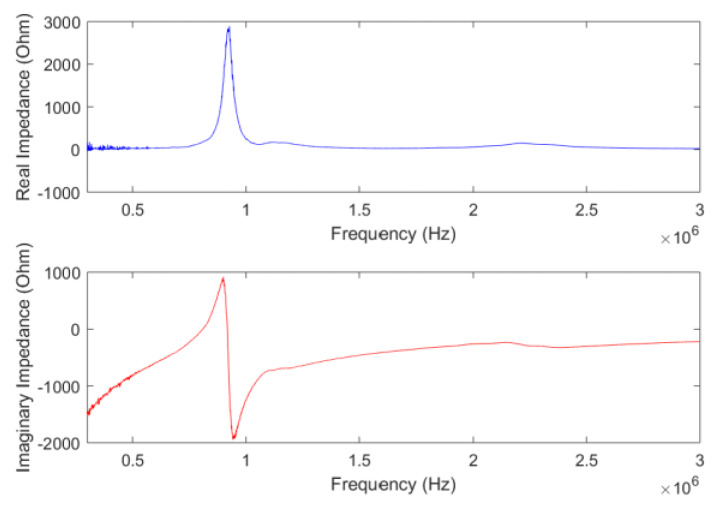
Tactile sensing is paramount for robots operating in human-centered environments to help in understanding interaction with objects. To enable robots to have sophisticated tactile sensing capability, researchers have developed different kinds of electronic skins for robotic hands and arms in order to realize the 'sense of touch'. Recently, Stanford Structures and Composites Laboratory developed a robotic electronic skin based on a network of multi-modal micro-sensors. This skin was able to identify temperature profiles and detect arm strikes through embedded sensors. However, sensing for the static pressure load is yet to be investigated. In this work, an electromechanical impedance-based method is proposed to investigate the response of piezoelectric sensors under static normal pressure loads. The smart skin sample was firstly fabricated by embedding a piezoelectric sensor into the soft silicone. Then, a series of static pressure tests to the skin were conducted. Test results showed that the first peak of the real part impedance signal was sensitive to static pressure load, and by using the proposed diagnostic method, this test setup could detect a resolution of 0.5 N force. Numerical simulation methods were then performed to validate the experimental results. The results of the numerical simulation prove the validity of the experiments, as well as the robustness of the proposed method in detecting static pressure loads using the smart skin.
Keywords: electromechanical impedance-based method; electronic skin; piezoelectric sensors; robotic tactile sensing; static pressure load sensing.
Conflict of interest statement
The authors declare no conflict of interest.
Figures













References
-
- Jacobsen S.C., Wood J.E., Knutti D., Biggers K.B. The UTAH/MIT dextrous hand: Work in progress. Int. J. Robot. Res. 1984;3:21–50. doi: 10.1177/027836498400300402. - DOI
-
- Dahiya R.S., Metta G., Valle M., Sandini G. Tactile sensing—From humans to humanoids. IEEE Trans. Robot. 2009;26:1–20. doi: 10.1109/TRO.2009.2033627. - DOI
-
- Lee M.H. Tactile sensing: New directions, new challenges. Int. J. Robot. Res. 2000;19:636–643. doi: 10.1177/027836490001900702. - DOI
-
- Cutkosky M.R., Howe R.D., Provancher W.R. Force and Tactile Sensors. Springer Handb. Robot. 2008;100:455–476.
-
- Howe R.D. Tactile sensing and control of robotic manipulation. Adv. Robot. 1993;8:245–261. doi: 10.1163/156855394X00356. - DOI
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
