

Comparison of operation of spinal locomotor networks activated by supraspinal commands and by epidural stimulation of the spinal cord in cats
- PMID: 32445488
- PMCID: PMC8106146
- DOI: 10.1113/JP279460
Comparison of operation of spinal locomotor networks activated by supraspinal commands and by epidural stimulation of the spinal cord in cats
Abstract
Key points: Epidural electrical stimulation (ES) of the spinal cord restores/improves locomotion in patients. ES-evoked locomotor movements differ to some extent from the normal ones. Operation of the locomotor network during ES is unknown. We compared the activity of individual spinal neurons during locomotion initiated by signals from the brainstem and by ES. We demonstrated that the spinal network generating locomotion under each of the two conditions is formed by the same neurons. A part of this network operates similarly under the two conditions, suggesting that it is essential for generation of locomotion under both conditions. Another part of this network operates differently under the two conditions, suggesting that it is responsible for differences in the movement kinematics observed under the two conditions.
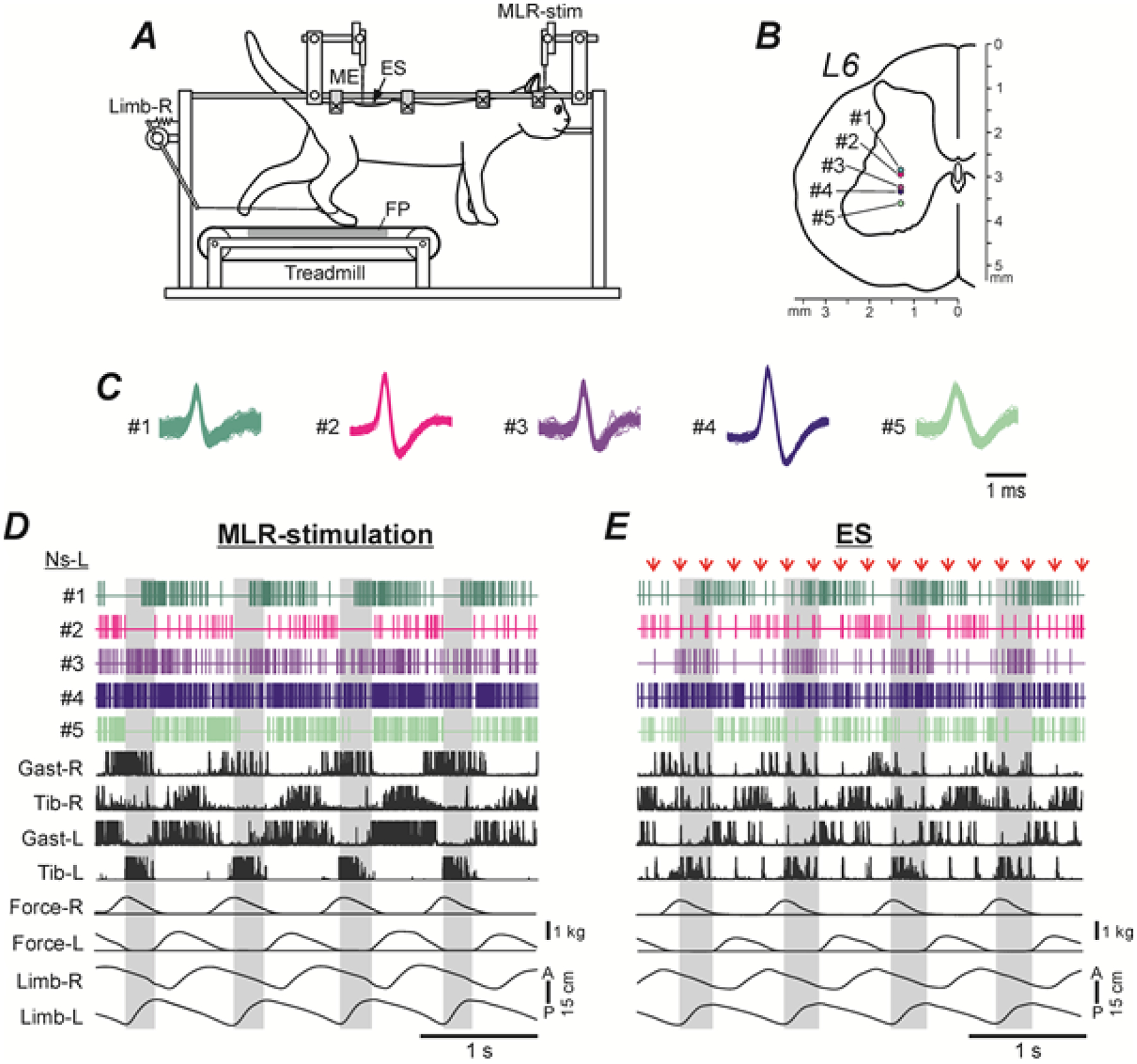
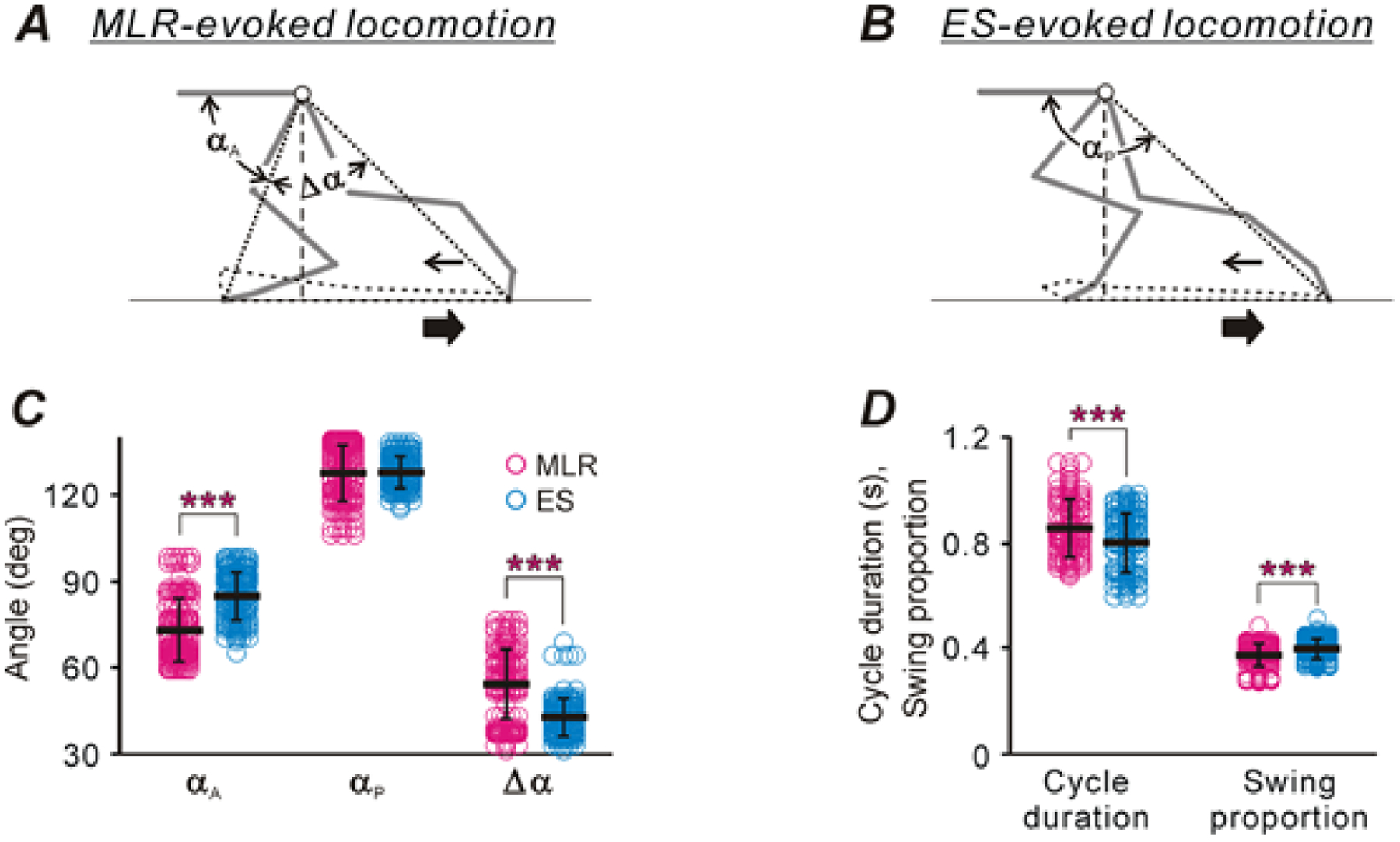
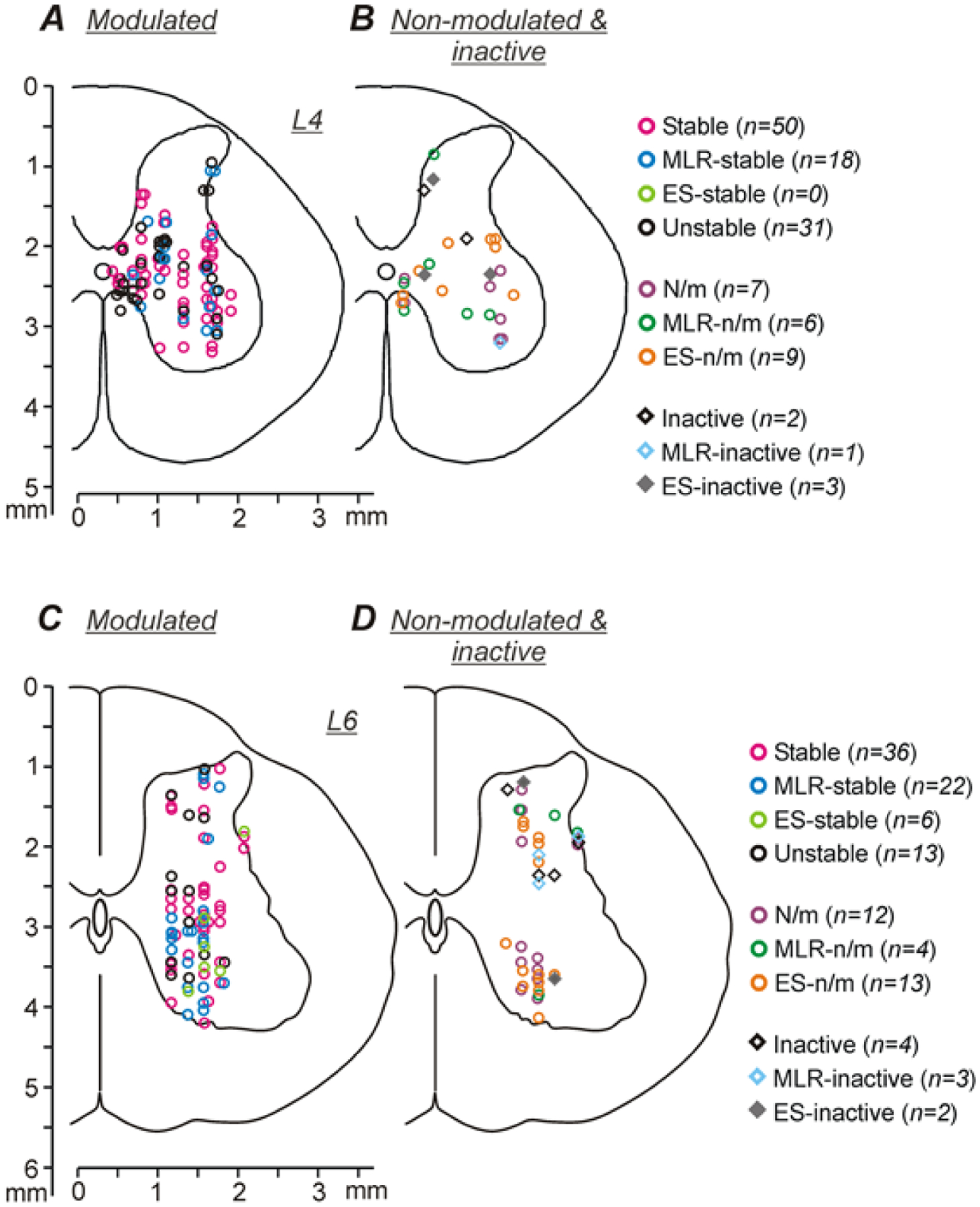
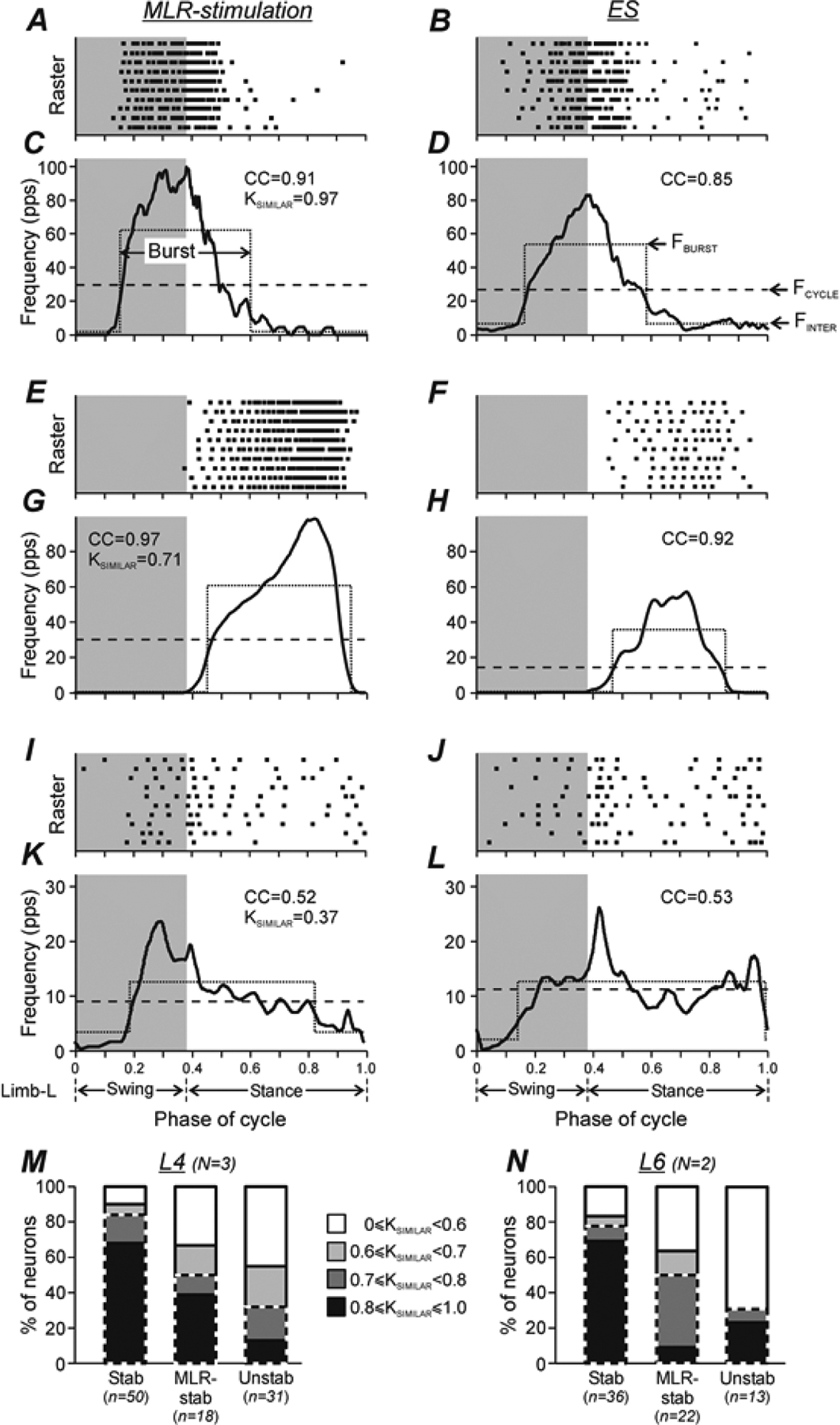
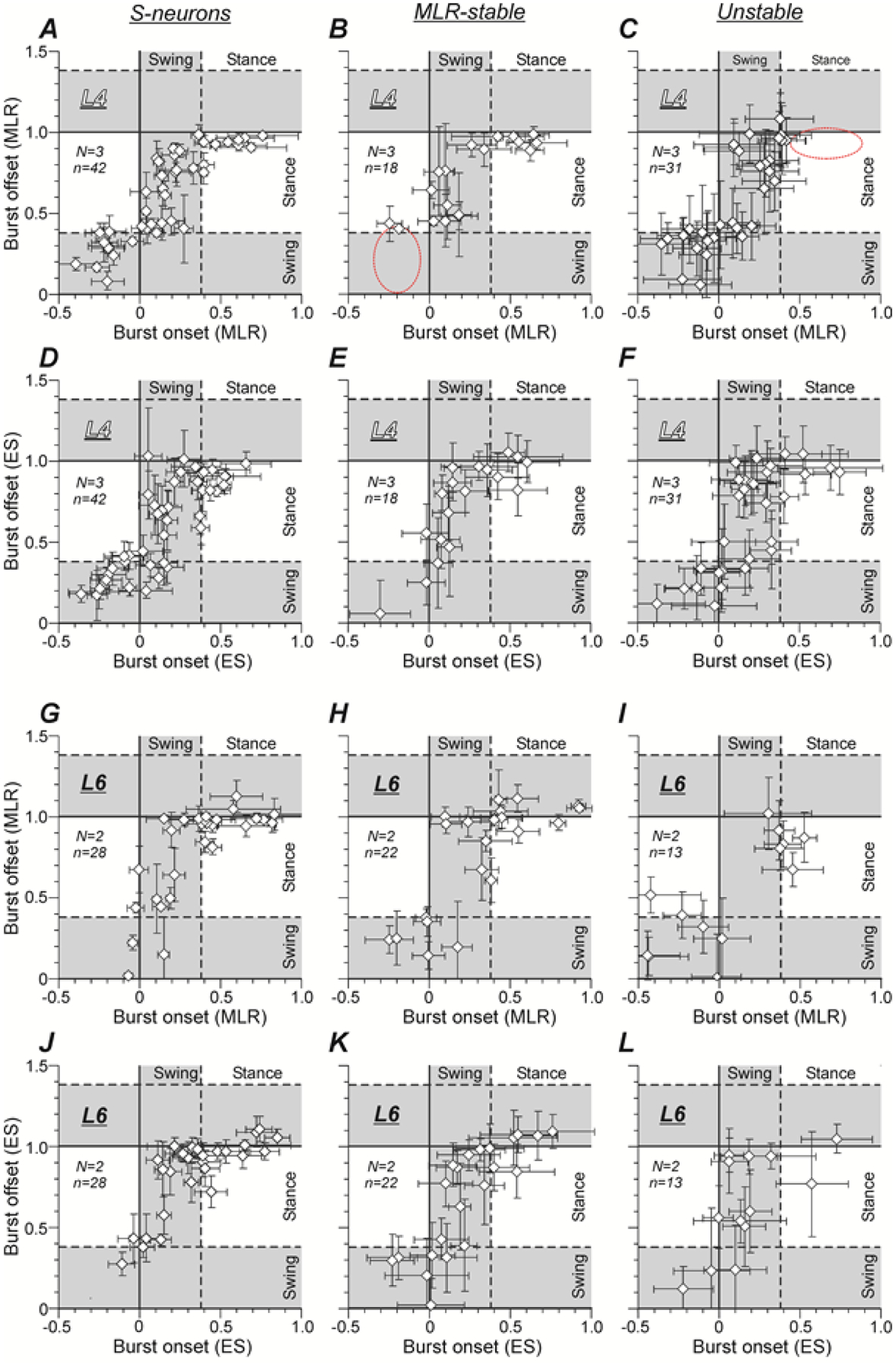
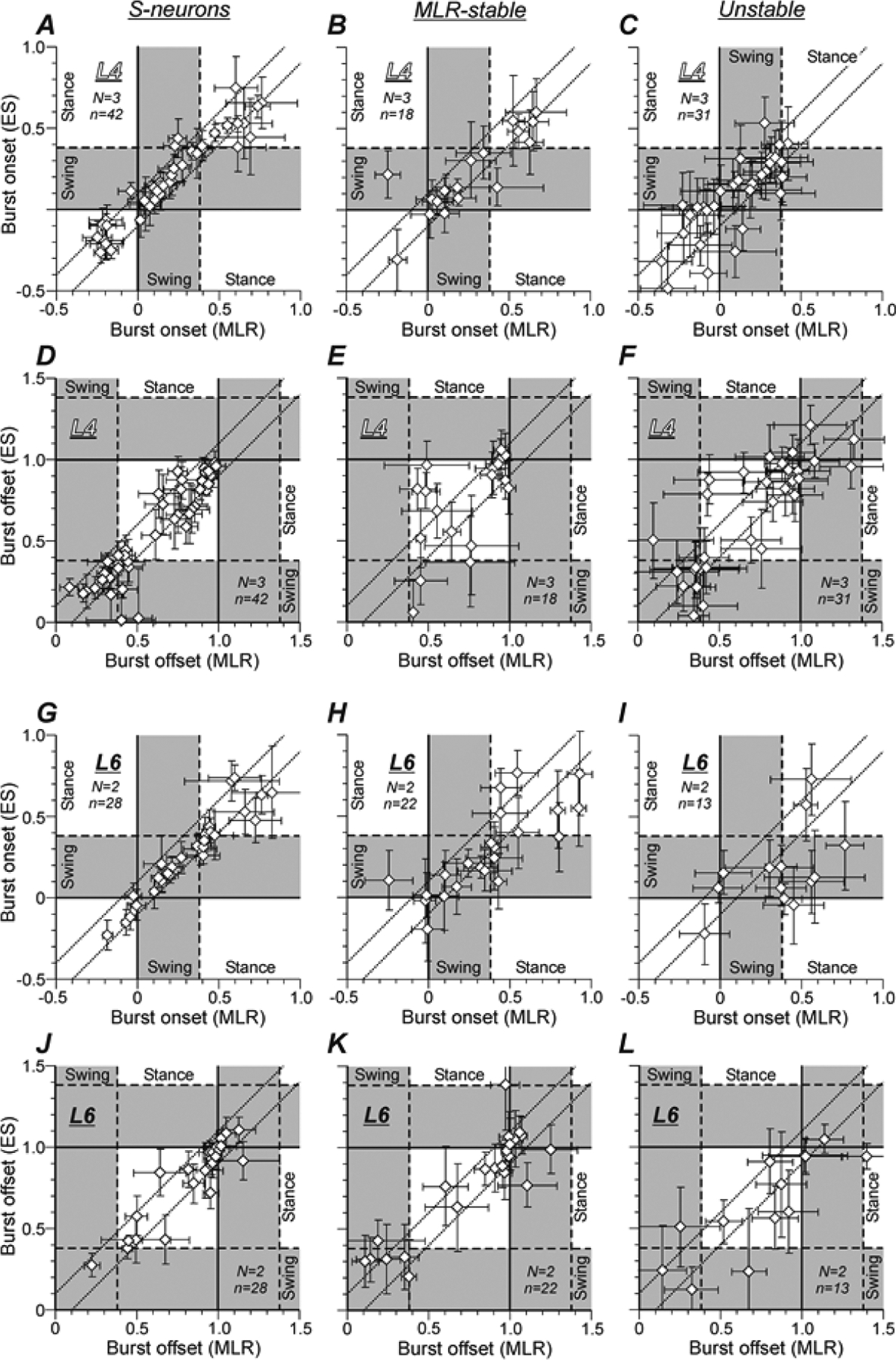
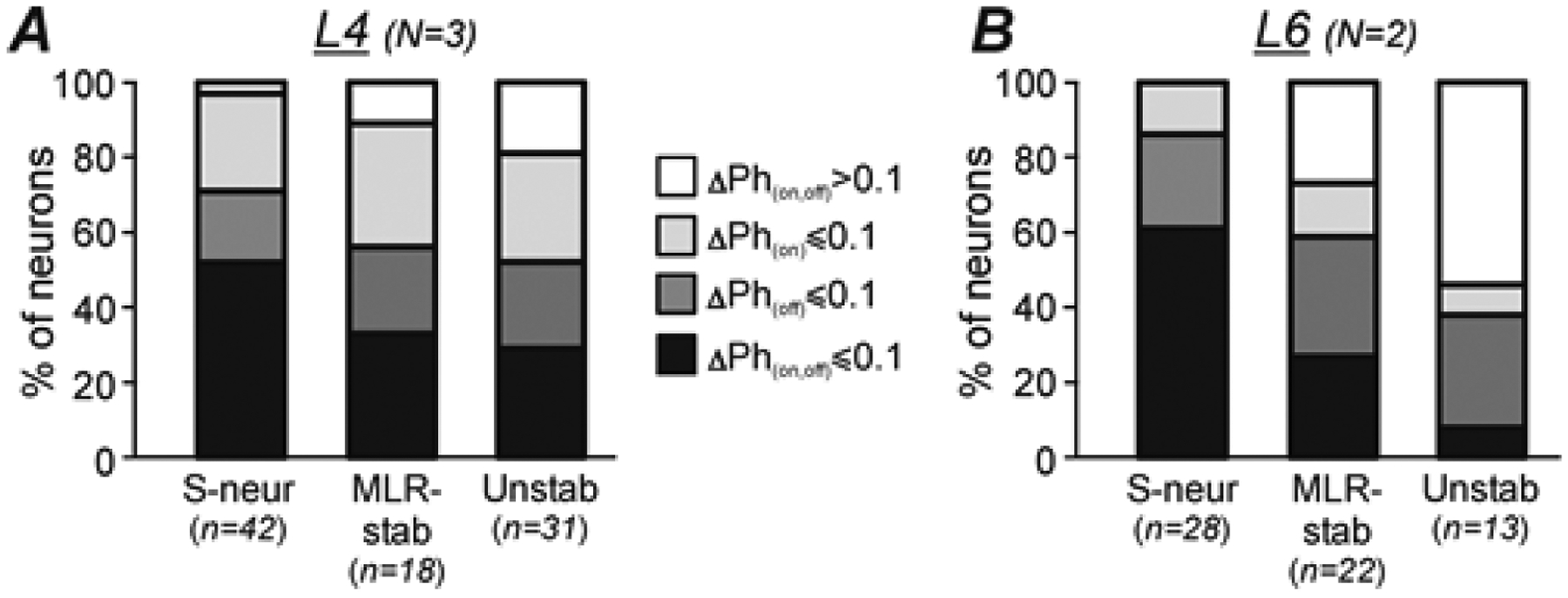
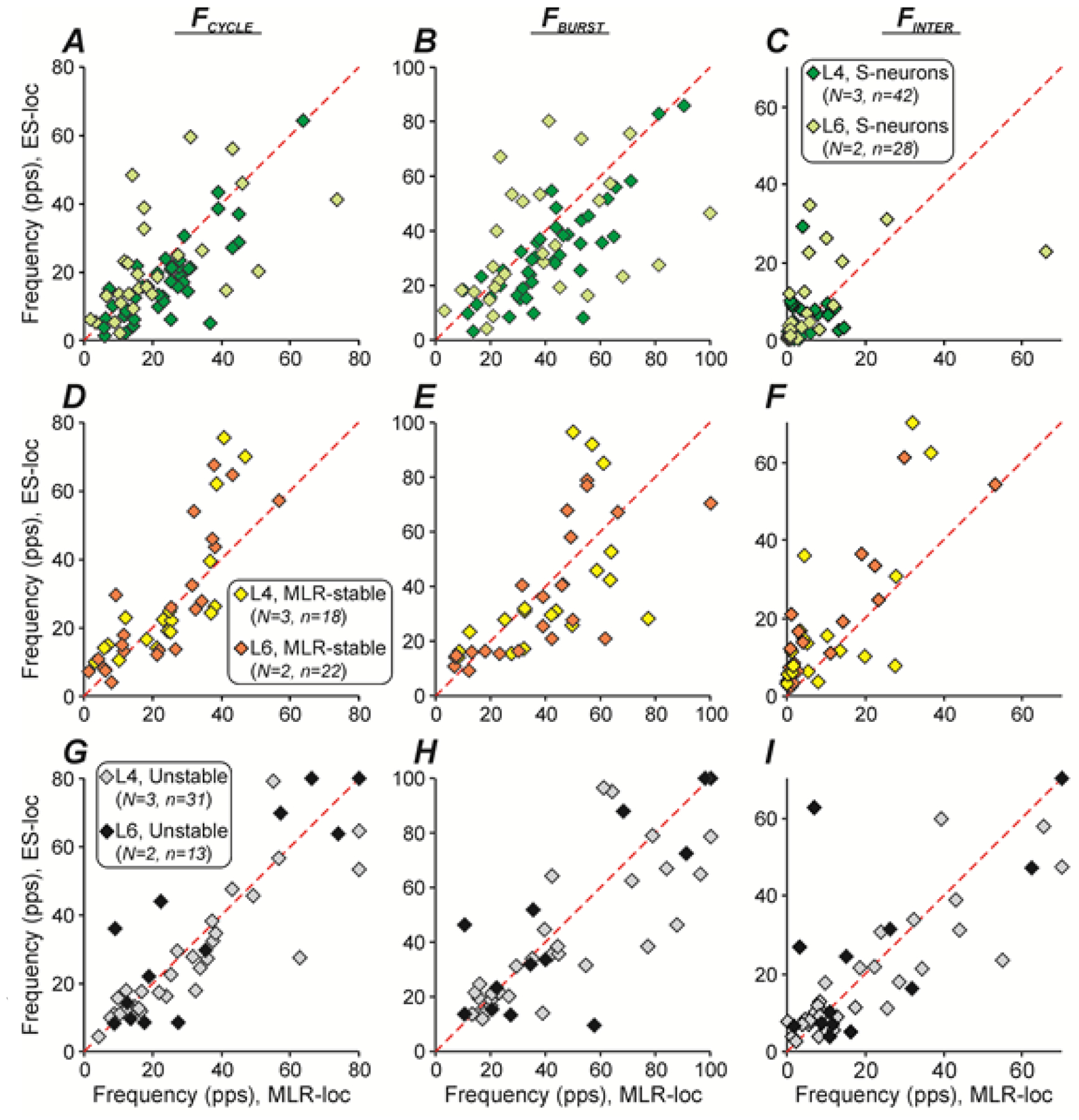
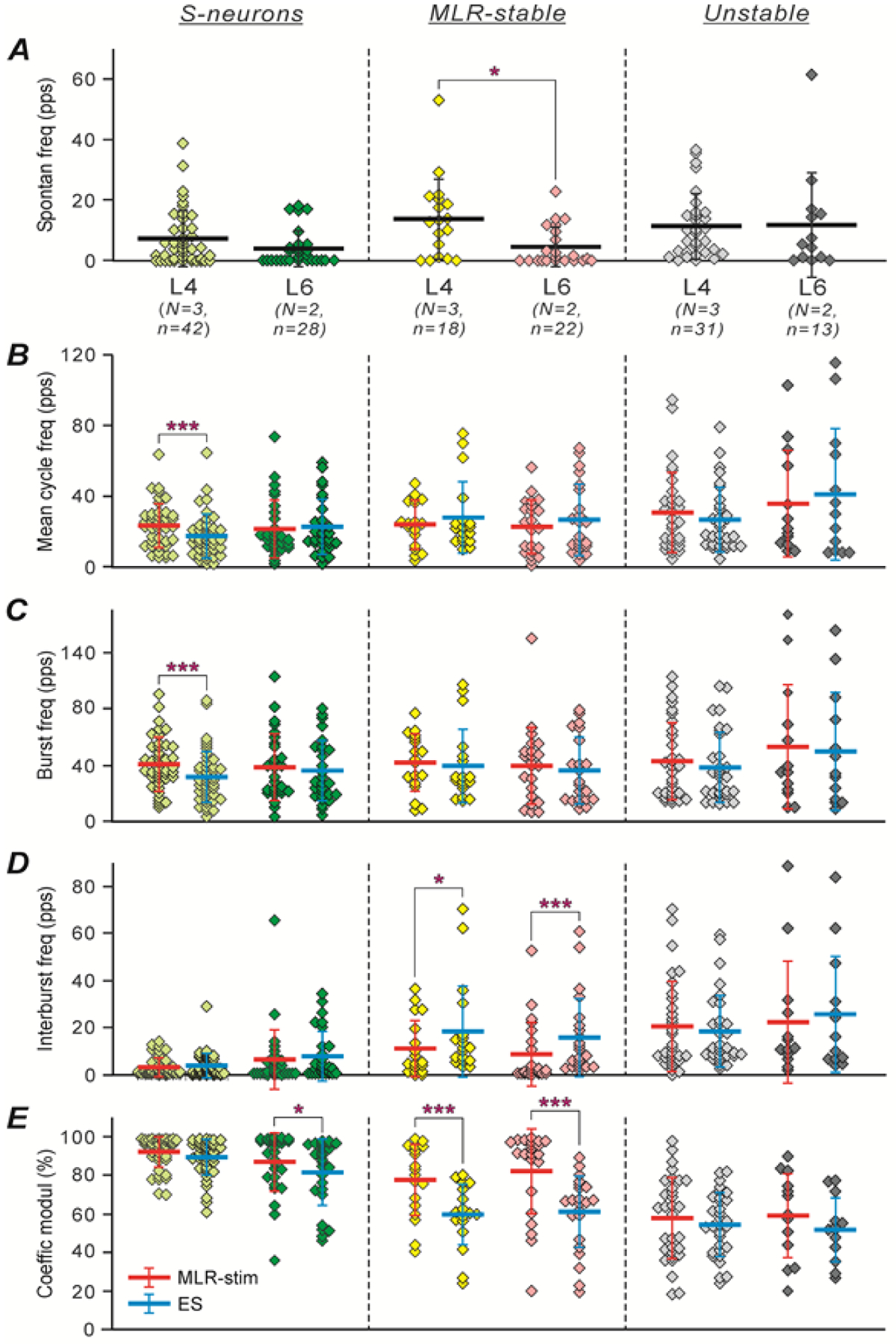
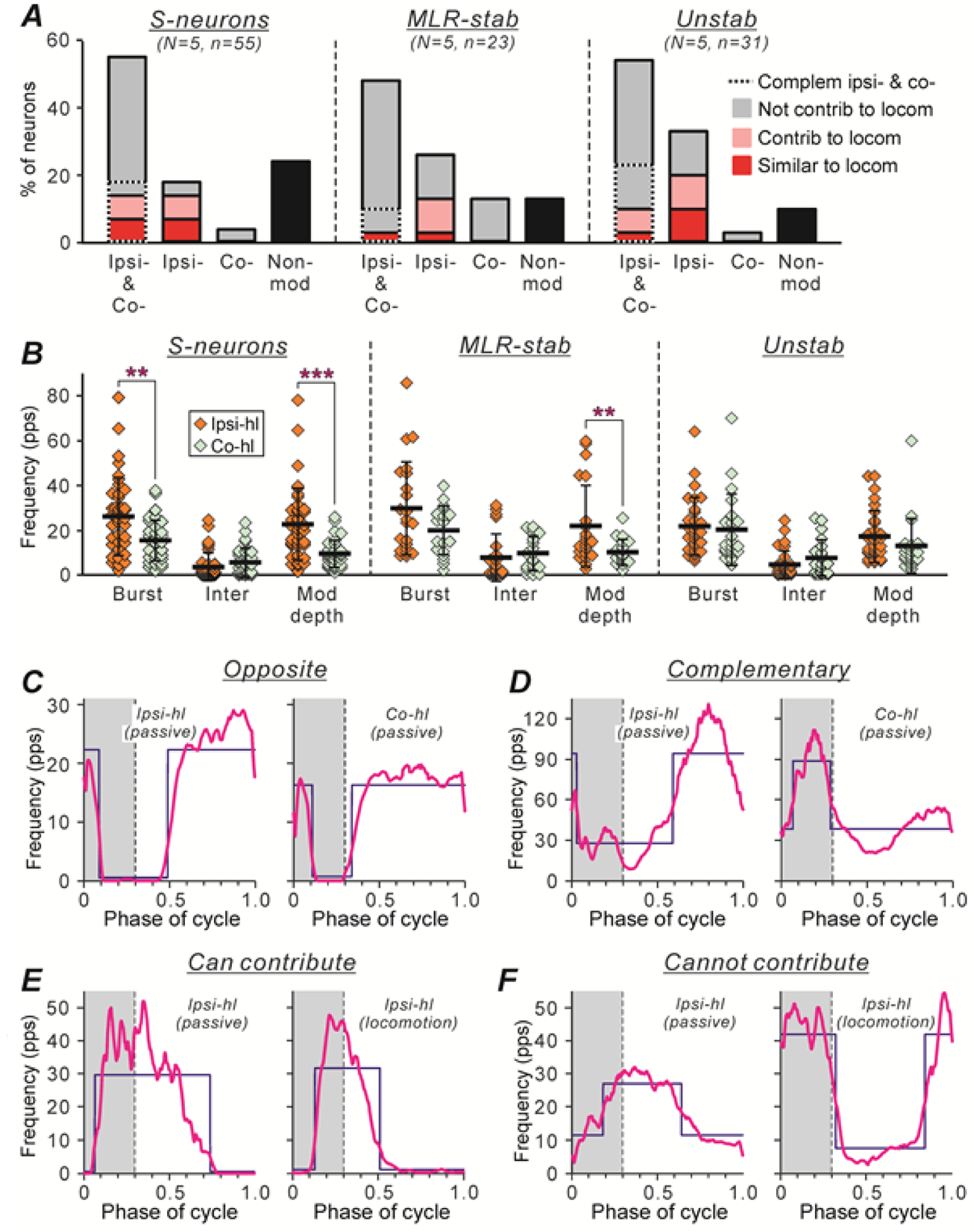
Abstract: Locomotion is a vital motor function for both animals and humans. Epidural electrical stimulation (ES) of the spinal cord is used to restore/improve locomotor movements in patients. However, operation of locomotor networks during ES has never been studied. Here we compared the activity of individual spinal neurons recorded in decerebrate cats of either sex during locomotion initiated by supraspinal commands (caused by stimulation of the mesencephalic locomotor region, MLR) and by ES. We found that under both conditions, the same neurons had modulation of their activity related to the locomotor rhythm, suggesting that the network generating locomotion under the two conditions is formed by the same neurons. About 40% of these neurons had stable modulation (i.e. small dispersion of their activity phase in sequential cycles), as well as a similar phase and shape of activity burst in MLR- and ES-evoked locomotor cycles. We suggest that these neurons form a part of the locomotor network that operates similarly under the two conditions, and are critical for generation of locomotion. About 23% of the modulated neurons had stable modulation only during MLR-evoked locomotion. We suggest that these neurons are responsible for some differences in kinematics of MLR- and ES-evoked locomotor movements. Finally, 25% of the modulated neurons had unstable modulation during both MLR- and ES-evoked locomotion. One can assume that these neurons contribute to maintenance of the excitability level of locomotor networks necessary for generation of stepping, or belong to postural networks, activated simultaneously with locomotor networks by both MLR stimulation and ES.
Keywords: decerebrate cat; epidural stimulation; locomotion; mesencephalic locomotor region; sensory feedback; spinal neurons.
© 2020 The Authors. The Journal of Physiology © 2020 The Physiological Society.
Conflict of interest statement
Competing interests
The authors declare that they have no competing interests.
Figures
References
-
- Baev KV, Degtyarenko AM, Zavadskaya TV & Kostyuk PG (1979). Activity of lumbar interneurons during fictitious locomotion in thalamic cats. Neirofiziologiya 11, 329–338. - PubMed
-
- Baev KV, Beresovskii VK, Kebkalo TG & Savoskina LA (1988). Afferent and efferent connections of brainstem locomotor regions study by means of horseradish peroxidase transport technique. Neuroscience 26, 871–892. - PubMed
-
- Barthélemy D, Leblond H & Rossignol S (2007). Characteristics of mechanisms of locomotion induced by intraspinal microstimulation and dorsal root stimulation in spinal cats. J Neurophysiol 97, 1986–2000. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous