

Augmenting propulsion demands during split-belt walking increases locomotor adaptation of asymmetric step lengths
- PMID: 32493440
- PMCID: PMC7268294
- DOI: 10.1186/s12984-020-00698-y
Augmenting propulsion demands during split-belt walking increases locomotor adaptation of asymmetric step lengths
Abstract
Background: Promising studies have shown that the gait symmetry of individuals with hemiparesis due to brain lesions, such as stroke, can improve through motor adaptation protocols forcing patients to use their affected limb more. However, little is known about how to facilitate this process. Here we asked if increasing propulsion demands during split-belt walking (i.e., legs moving at different speeds) leads to more motor adaptation and more symmetric gait in survivors of a stroke, as we previously observed in subjects without neurological disorders.
Methods: We investigated the effect of propulsion forces on locomotor adaptation during and after split-belt walking in the asymmetric motor system post-stroke. To test this, 12 subjects in the chronic phase post-stroke experienced a split-belt protocol in a flat and incline session so as to contrast the effects of two different propulsion demands. Step length asymmetry and propulsion forces were used to compare the motor behavior between the two sessions because these are clinically relevant measures that are altered by split-belt walking.
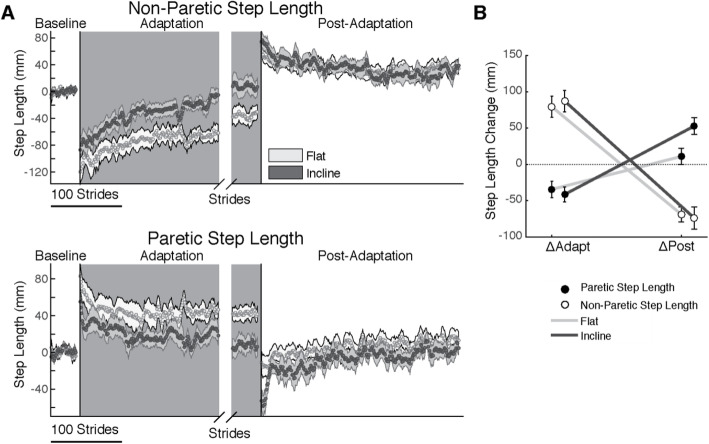
Results: The incline session resulted in more symmetric step lengths during late split-belt walking and larger after-effects following split-belt walking. In both testing sessions, subjects who have had a stroke adapted to regain speed and slope-specific leg orientations similarly to young, intact adults. Importantly, leg orientations, which were set by kinetic demands, during baseline walking were predictive of those achieved during split-belt walking, which in turn predicted each individual's post-adaptation behavior. These results are relevant because they provide evidence that survivors of a stroke can generate the leg-specific forces to walk more symmetrically, but also because we provide insight into factors underlying the therapeutic effect of split-belt walking.
Conclusions: Individuals post-stroke at a chronic stage can adapt more during split-belt walking and have greater after-effects when propulsion demands are augmented by inclining the treadmill surface. Our results are promising since they suggest that increasing propulsion demands during paradigms that force patients to use their paretic side more could correct gait asymmetries post-stroke more effectively.
Keywords: Hemiparesis; Motor learning; Stroke.
Conflict of interest statement
The authors declare that they have no competing interests.
Figures




References
-
- Andrews SC, Curtin D, Hawi Z, Wongtrakun J, Stout JC, Coxon JP. Intensity matters: high-intensity interval exercise enhances motor cortex plasticity more than moderate exercise. Cereb Cortex. 2019;30(1):1–12. - PubMed
-
- Balasubramanian CK, Bowden MG, Neptune RR, Kautz SA. Relationship between step length asymmetry and walking performance in subjects with chronic hemiparesis. Arch Phys Med Rehabil. 2007;88(1):43–49. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
