

Leveraging elastic instabilities for amplified performance: Spine-inspired high-speed and high-force soft robots
- PMID: 32494714
- PMCID: PMC7209986
- DOI: 10.1126/sciadv.aaz6912
Leveraging elastic instabilities for amplified performance: Spine-inspired high-speed and high-force soft robots
Abstract
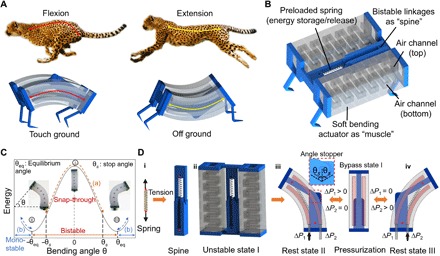
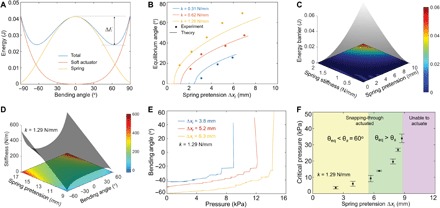
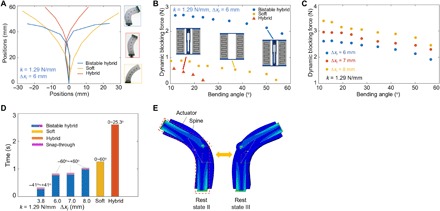
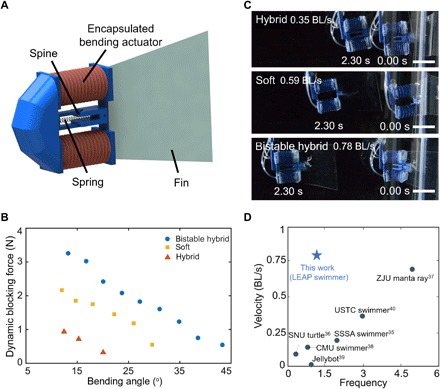
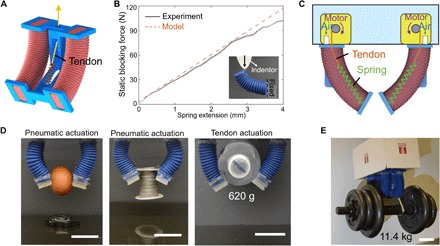
Soft machines typically exhibit slow locomotion speed and low manipulation strength because of intrinsic limitations of soft materials. Here, we present a generic design principle that harnesses mechanical instability for a variety of spine-inspired fast and strong soft machines. Unlike most current soft robots that are designed as inherently and unimodally stable, our design leverages tunable snap-through bistability to fully explore the ability of soft robots to rapidly store and release energy within tens of milliseconds. We demonstrate this generic design principle with three high-performance soft machines: High-speed cheetah-like galloping crawlers with locomotion speeds of 2.68 body length/s, high-speed underwater swimmers (0.78 body length/s), and tunable low-to-high-force soft grippers with over 1 to 103 stiffness modulation (maximum load capacity is 11.4 kg). Our study establishes a new generic design paradigm of next-generation high-performance soft robots that are applicable for multifunctionality, different actuation methods, and materials at multiscales.
Copyright © 2020 The Authors, some rights reserved; exclusive licensee American Association for the Advancement of Science. No claim to original U.S. Government Works. Distributed under a Creative Commons Attribution NonCommercial License 4.0 (CC BY-NC).
Figures

References
-
- Deimel R., Brock O., A novel type of compliant and underactuated robotic hand for dexterous grasping. Int. J. Robot. Res. 35, 161–185 (2016).
-
- Polygerinos P., Wang Z., Galloway K. C., Wood R. J., Walsh C. J., Soft robotic glove for combined assistance and at-home rehabilitation. Robot. Auton. Syst. 73, 135–143 (2015).
-
- Hawkes E. W., Blumenschein L. H., Greer J. D., Okamura A. M., A soft robot that navigates its environment through growth. Sci. Robot. 2, eaan3028 (2017). - PubMed
-
- Marchese A. D., Tedrake R., Rus D., Dynamics and trajectory optimization for a soft spatial fluidic elastomer manipulator. Int. J. Robot. Res. 35, 1000–1019 (2016).
LinkOut - more resources
Full Text Sources
Other Literature Sources
