

Anticipatory control of human gait following simulated slip exposure
- PMID: 32541837
- PMCID: PMC7295774
- DOI: 10.1038/s41598-020-66305-1
Anticipatory control of human gait following simulated slip exposure
Abstract
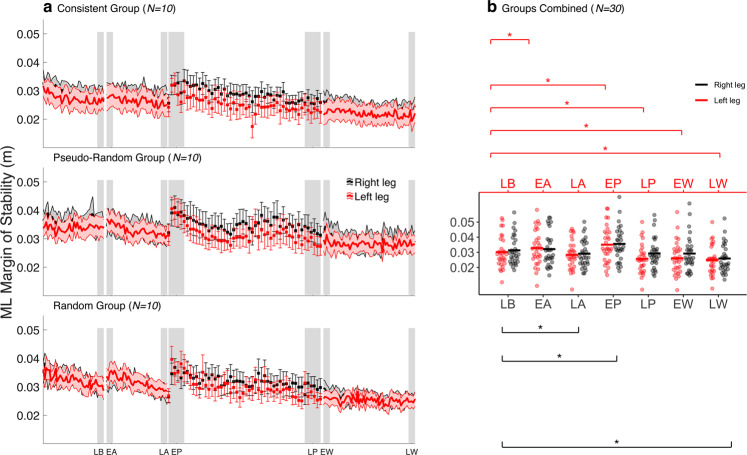
A cautious gait (CG), marked by wider and shorter steps, is typically employed to mitigate expected perturbations proactively. However, it is not well understood if and how CG is informed by the task requirements. Therefore, we assessed how CG is adjusted to these requirements. Three groups of ten healthy young adults were exposed to a single uninterrupted protocol of treadmill walking that consisted of three distinct phases. Spatiotemporal step characteristics and margins of stability of the unperturbed strides were compared when participants were (i) only warned of a perturbation, (ii) exposed to fifty unilateral (right) slip-like perturbations and (iii) kept unaware of perturbation removal. Only the perturbation intensity predictability differed between groups. This was either kept consistent or pseudo-randomly or randomly varied. Participants walked with wider and shorter steps following the perturbation warning. However, this extinguished in continuing perturbation absence. Next, during perturbation exposure, participants shortened the step of the perturbed but increased the step of the unperturbed leg. This did not differ between groups. Finally, participants persisted in displaying CG on perturbation removal, but this extinguished over time. Collectively, we show that CG is functionally adjusted to the task requirements. These findings may have practical implications for fall-prevention training.
Conflict of interest statement
The authors declare no competing interests.
Figures



References
-
- Winter DA. Human balance and posture control during standing and walking. Gait Posture. 1995;3:193–214. doi: 10.1016/0966-6362(96)82849-9. - DOI
-
- Kovacs CR. Age-related changes in gait and obstacle avoidance capabilities in older adults: a review. J. Appl. Gerontol. 2005;24(1):21–34. doi: 10.1177/0733464804271279. - DOI
MeSH terms
LinkOut - more resources
Full Text Sources
