

Spatial planning with long visual range benefits escape from visual predators in complex naturalistic environments
- PMID: 32546681
- PMCID: PMC7298009
- DOI: 10.1038/s41467-020-16102-1
Spatial planning with long visual range benefits escape from visual predators in complex naturalistic environments
Erratum in
-
Publisher Correction: Spatial planning with long visual range benefits escape from visual predators in complex naturalistic environments.Nat Commun. 2020 Jul 14;11(1):3580. doi: 10.1038/s41467-020-17398-9. Nat Commun. 2020. PMID: 32665561 Free PMC article.
Abstract
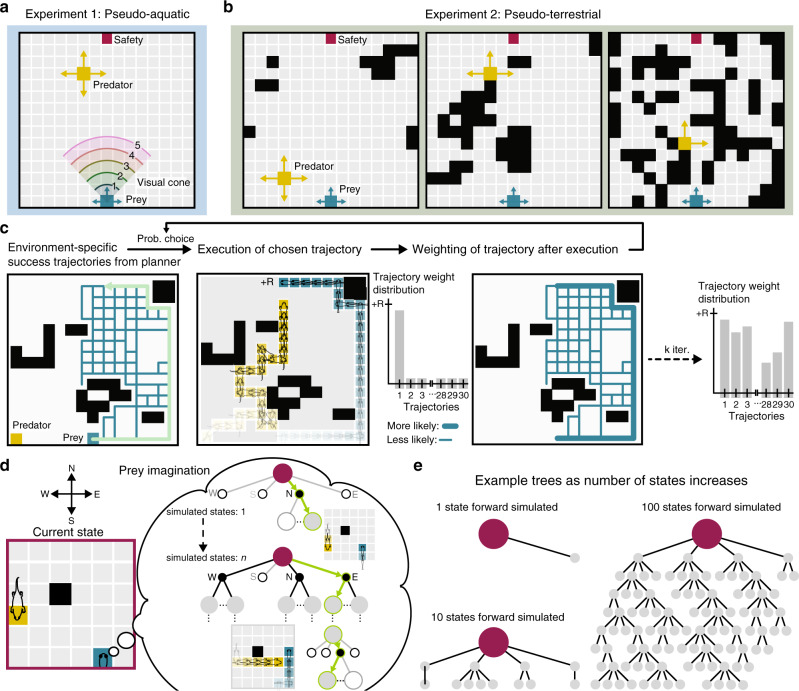
It is uncontroversial that land animals have more elaborated cognitive abilities than their aquatic counterparts such as fish. Yet there is no apparent a-priori reason for this. A key cognitive faculty is planning. We show that in visually guided predator-prey interactions, planning provides a significant advantage, but only on land. During animal evolution, the water-to-land transition resulted in a massive increase in visual range. Simulations of behavior identify a specific type of terrestrial habitat, clustered open and closed areas (savanna-like), where the advantage of planning peaks. Our computational experiments demonstrate how this patchy terrestrial structure, in combination with enhanced visual range, can reveal and hide agents as a function of their movement and create a selective benefit for imagining, evaluating, and selecting among possible future scenarios-in short, for planning. The vertebrate invasion of land may have been an important step in their cognitive evolution.
Conflict of interest statement
The authors declare no competing interests.
Figures




References
-
- Stein, W. E. et al. Mid-Devonian Archaeopteris roots signal revolutionary change in earliest fossil forests. Curr. Biol. 0 (2019). - PubMed
-
- Yamakita T, Miyashita V. In Integrative Observations and Assessments, Ecological Research Monographs. Tokyo: Springer Japan; 2014. pp. 131–148.
-
- Daw ND, Niv Y, Dayan P. Uncertainty-based competition between prefrontal and dorsolateral striatal systems for behavioral control. Nat. Neurosci. 2005;8:1704–1711. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
