

Evaluation of Surgical Skills during Robotic Surgery by Deep Learning-Based Multiple Surgical Instrument Tracking in Training and Actual Operations
- PMID: 32585953
- PMCID: PMC7355689
- DOI: 10.3390/jcm9061964
Evaluation of Surgical Skills during Robotic Surgery by Deep Learning-Based Multiple Surgical Instrument Tracking in Training and Actual Operations
Abstract
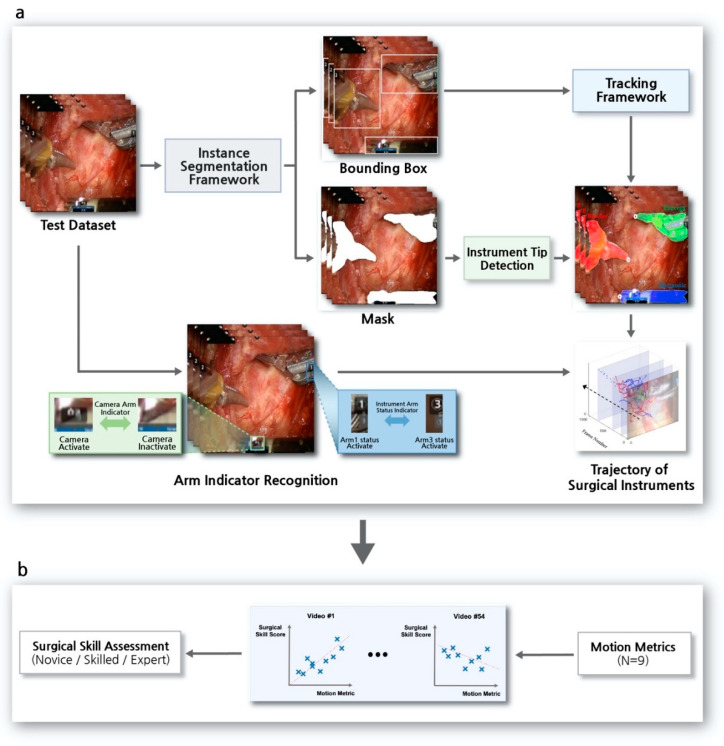
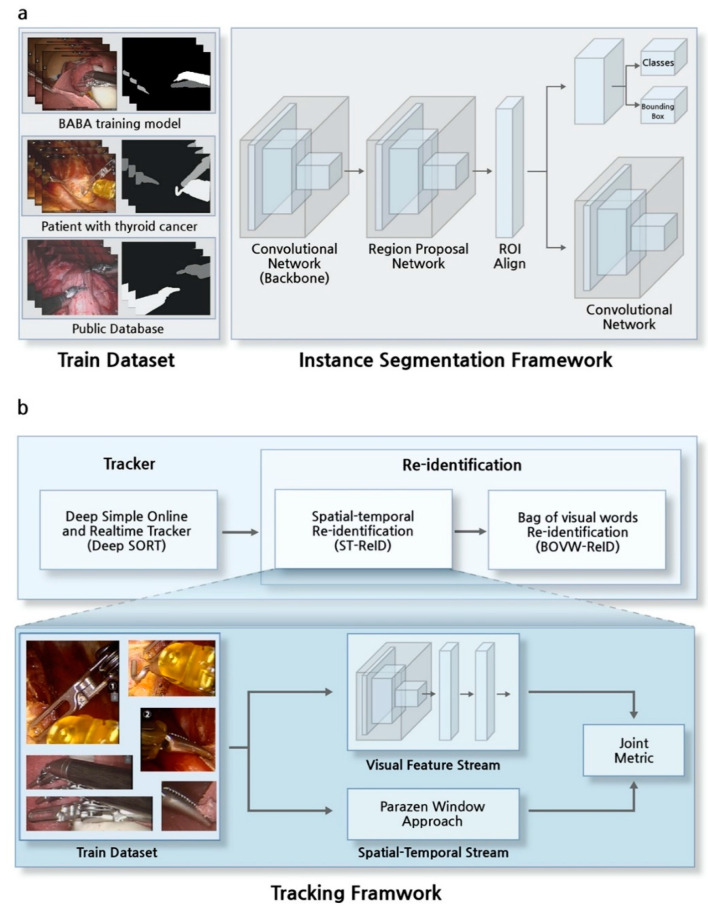
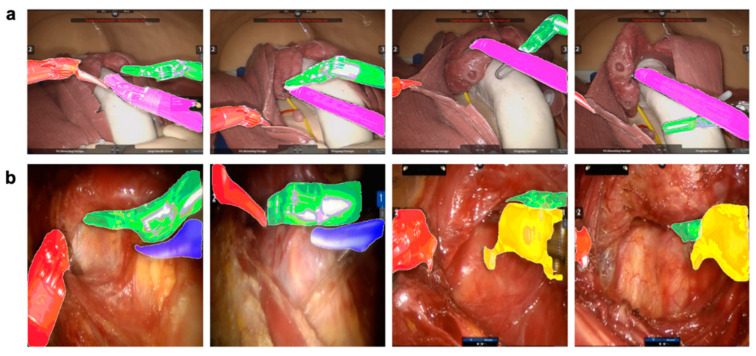
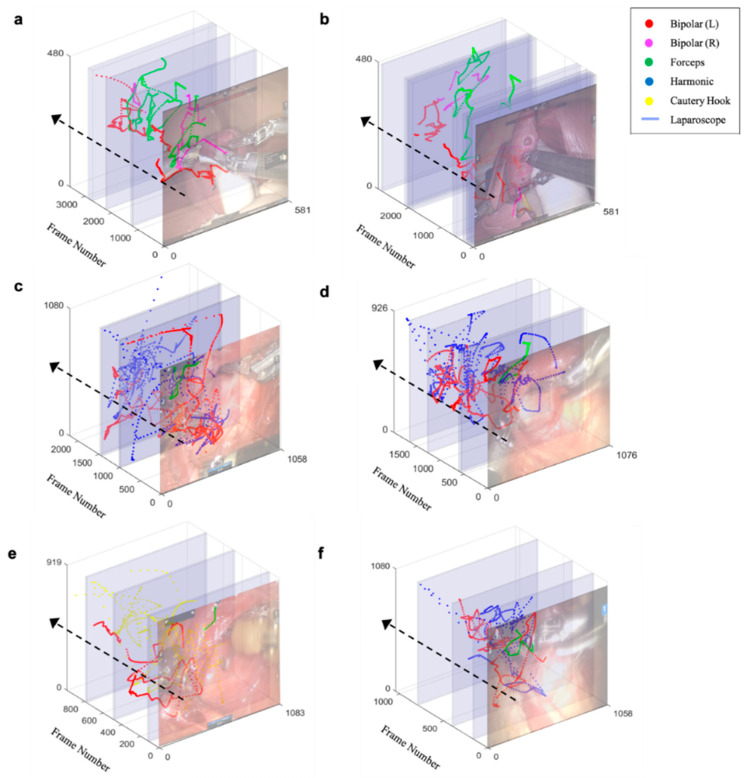
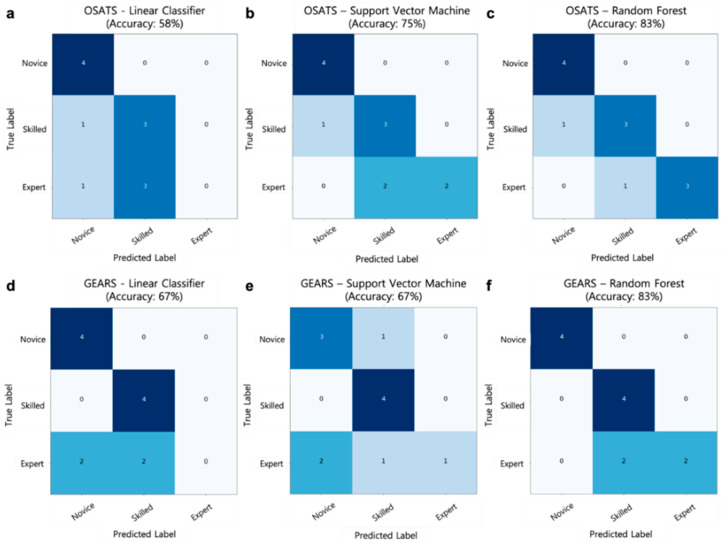
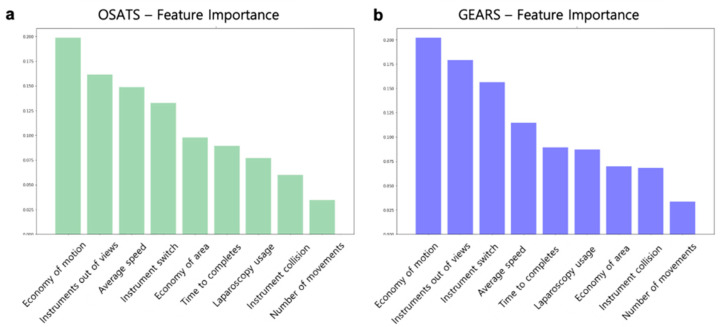
As the number of robotic surgery procedures has increased, so has the importance of evaluating surgical skills in these techniques. It is difficult, however, to automatically and quantitatively evaluate surgical skills during robotic surgery, as these skills are primarily associated with the movement of surgical instruments. This study proposes a deep learning-based surgical instrument tracking algorithm to evaluate surgeons' skills in performing procedures by robotic surgery. This method overcame two main drawbacks: occlusion and maintenance of the identity of the surgical instruments. In addition, surgical skill prediction models were developed using motion metrics calculated from the motion of the instruments. The tracking method was applied to 54 video segments and evaluated by root mean squared error (RMSE), area under the curve (AUC), and Pearson correlation analysis. The RMSE was 3.52 mm, the AUC of 1 mm, 2 mm, and 5 mm were 0.7, 0.78, and 0.86, respectively, and Pearson's correlation coefficients were 0.9 on the x-axis and 0.87 on the y-axis. The surgical skill prediction models showed an accuracy of 83% with Objective Structured Assessment of Technical Skill (OSATS) and Global Evaluative Assessment of Robotic Surgery (GEARS). The proposed method was able to track instruments during robotic surgery, suggesting that the current method of surgical skill assessment by surgeons can be replaced by the proposed automatic and quantitative evaluation method.
Keywords: deep learning; quantitative evaluation; robotic surgery; surgical instrument tracking; surgical skills.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- Hilal Z., Kumpernatz A.K., Rezniczek G.A., Cetin C., Tempfer-Bentz E.-K., Tempfer C.B. A randomized comparison of video demonstration versus hands-on training of medical students for vacuum delivery using Objective Structured Assessment of Technical Skills (OSATS) Medicine. 2017;96:11. doi: 10.1097/MD.0000000000006355. - DOI - PMC - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Research Materials
