

Motion Detection Using Tactile Sensors Based on Pressure-Sensitive Transistor Arrays
- PMID: 32605148
- PMCID: PMC7374490
- DOI: 10.3390/s20133624
Motion Detection Using Tactile Sensors Based on Pressure-Sensitive Transistor Arrays
Abstract
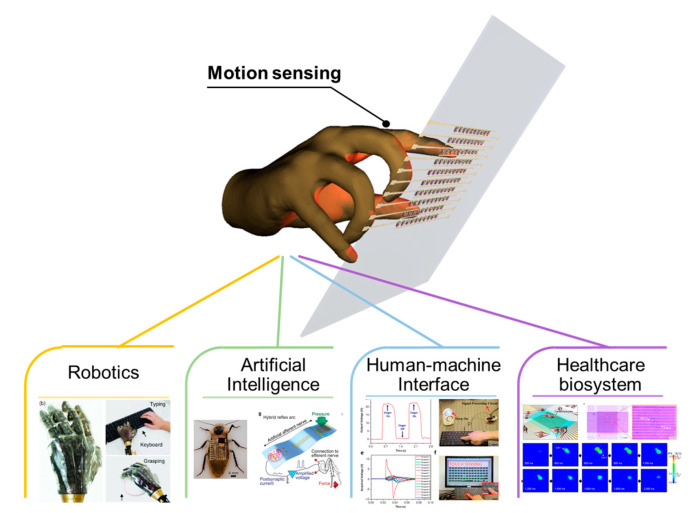
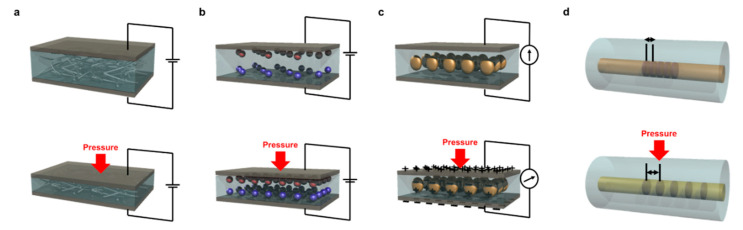
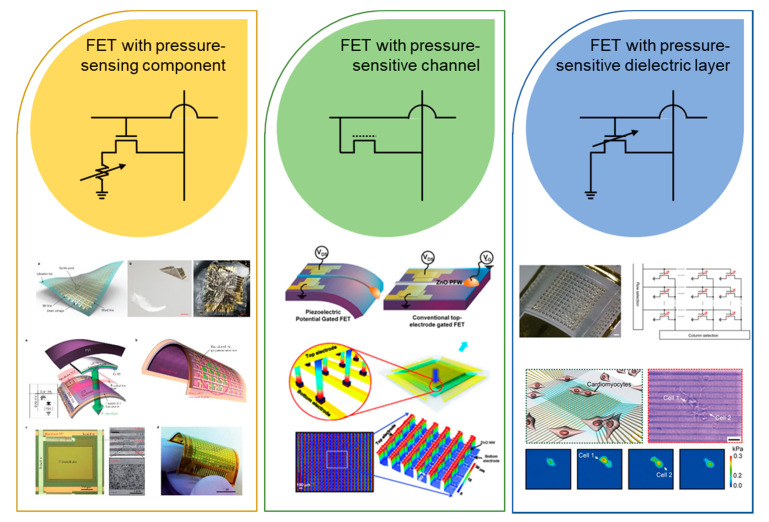
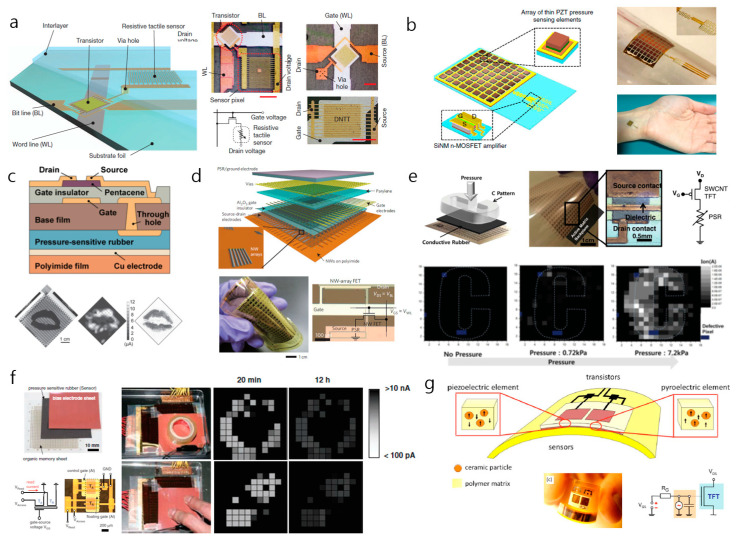
In recent years, to develop more spontaneous and instant interfaces between a system and users, technology has evolved toward designing efficient and simple gesture recognition (GR) techniques. As a tool for acquiring human motion, a tactile sensor system, which converts the human touch signal into a single datum and executes a command by translating a bundle of data into a text language or triggering a preset sequence as a haptic motion, has been developed. The tactile sensor aims to collect comprehensive data on various motions, from the touch of a fingertip to large body movements. The sensor devices have different characteristics that are important for target applications. Furthermore, devices can be fabricated using various principles, and include piezoelectric, capacitive, piezoresistive, and field-effect transistor types, depending on the parameters to be achieved. Here, we introduce tactile sensors consisting of field-effect transistors (FETs). GR requires a process involving the acquisition of a large amount of data in an array rather than a single sensor, suggesting the importance of fabricating a tactile sensor as an array. In this case, an FET-type pressure sensor can exploit the advantages of active-matrix sensor arrays that allow high-array uniformity, high spatial contrast, and facile integration with electrical circuitry. We envision that tactile sensors based on FETs will be beneficial for GR as well as future applications, and these sensors will provide substantial opportunities for next-generation motion sensing systems.
Keywords: gesture recognition; pressure sensor; tactile sensor; transistor.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- Wu Y., Huang T.S. Vision-Based Gesture Recognition: A review; Proceedings of the Gesture-Based Communication in Human-Computer Interaction; Berlin/Heidelberg, Germany. 17 March 1999; pp. 103–115.
-
- Jeon C., Kwon O.J., Shin D., Shin D. Hand-Mouse Interface Using Virtual Monitor Concept for Natural Interaction. IEEE Access. 2017;5:25181–25188. doi: 10.1109/ACCESS.2017.2768405. - DOI
-
- Dorner B., Hagen E. Towards an American Sign Language Interface; Proceedings of the Integration of Natural Language and Vision Processing: Computational Models and Systems; Dordrecht, The Netherlands. 31 July 1995; pp. 143–161.
Publication types
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Research Materials
