

Feature Sensing and Robotic Grasping of Objects with Uncertain Information: A Review
- PMID: 32630755
- PMCID: PMC7374444
- DOI: 10.3390/s20133707
Feature Sensing and Robotic Grasping of Objects with Uncertain Information: A Review
Abstract
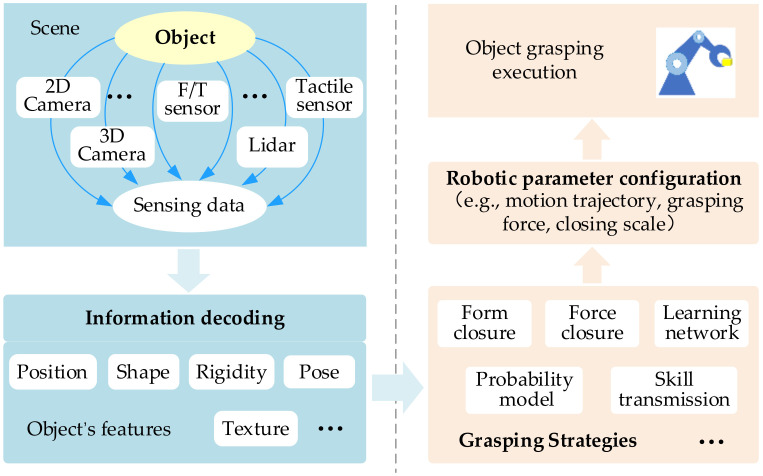
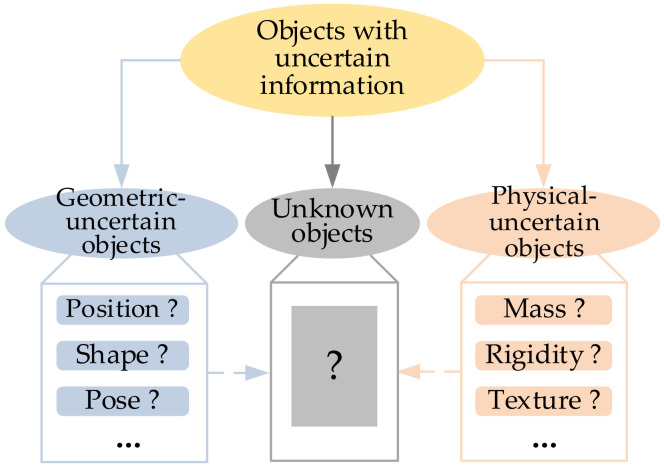
As there come to be more applications of intelligent robots, their task object is becoming more varied. However, it is still a challenge for a robot to handle unfamiliar objects. We review the recent work on the feature sensing and robotic grasping of objects with uncertain information. In particular, we focus on how the robot perceives the features of an object, so as to reduce the uncertainty of objects, and how the robot completes object grasping through the learning-based approach when the traditional approach fails. The uncertain information is classified into geometric information and physical information. Based on the type of uncertain information, the object is further classified into three categories, which are geometric-uncertain objects, physical-uncertain objects, and unknown objects. Furthermore, the approaches to the feature sensing and robotic grasping of these objects are presented based on the varied characteristics of each type of object. Finally, we summarize the reviewed approaches for uncertain objects and provide some interesting issues to be more investigated in the future. It is found that the object's features, such as material and compactness, are difficult to be sensed, and the object grasping approach based on learning networks plays a more important role when the unknown degree of the task object increases.
Keywords: feature sensing; geometric uncertainty; physical uncertainty; robotic grasping; uncertain objects.
Conflict of interest statement
The authors declare no conflict of interest.
Figures












References
-
- Hu L., Miao Y., Wu G., Hassan M.M., Humar I. iRobot-Factory: An intelligent robot factory based on cognitive manufacturing and edge computing. Future Gener. Comput. Syst. 2019;90:569–577. doi: 10.1016/j.future.2018.08.006. - DOI
-
- Bera A., Randhavane T., Manocha D. The Emotionally Intelligent Robot: Improving Socially-aware Human Prediction in Crowded Environments; Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops; Long Beach, BC, Canada. 16–20 June 2019.
-
- Wang T.M., Tao Y., Liu H. Current researches and future development trend of intelligent robot: A review. Int. J. Autom. Comput. 2018;15:525–546. doi: 10.1007/s11633-018-1115-1. - DOI
-
- Thanh V.N., Vinh D.P., Nghi N.T. Restaurant Serving Robot with Double Line Sensors Following Approach; Proceedings of the 2019 IEEE International Conference on Mechatronics and Automation; Tianjin, China. 4–7 August 2019; pp. 235–239.
-
- Yamazaki K., Ueda R., Nozawa S., Kojima M., Okada K., Matsumoto K., Ishikawa M., Shimoyama I., Inaba M. Home-assistant robot for an aging society. Proc. IEEE. 2012;100:2429–2441. doi: 10.1109/JPROC.2012.2200563. - DOI
Publication types
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Research Materials
