

Design and Validation of a Lower-Limb Haptic Rehabilitation Robot
- PMID: 32634097
- PMCID: PMC7556714
- DOI: 10.1109/TNSRE.2020.3000735
Design and Validation of a Lower-Limb Haptic Rehabilitation Robot
Abstract
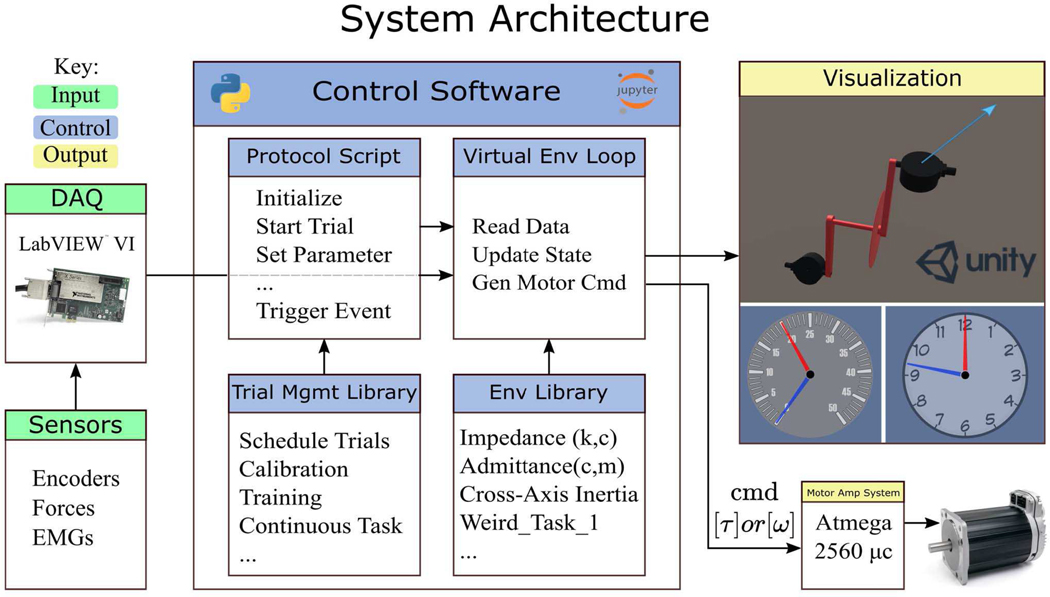
Present robots for investigating lower-limb motor control and rehabilitation focus on gait training. An alternative approach is to focus on restoring precursor abilities such as motor adaptation and volitional movement, as is common in upper-limb robotic therapy. Here we describe NOTTABIKE, a one degree-of-freedom rehabilitation robot designed to probe and promote these underlying capabilities. A recumbent exercise cycle platform is powered with a servomotor and instrumented with angular encoders, force-torque sensing pedals, and a wireless EMG system. Virtual environments ranging from spring-mass-damper systems to novel foot-to-crank mechanical laws present variants of leg-reaching and pedaling tasks that challenge perception, cognition, motion planning, and motor control systems. This paper characterizes the dynamic performance and haptic rendering accuracy of NOTTABIKE and presents an example motor adaptation task to illustrate its use. Torque and velocity mode controllers showed near unity magnitude ratio and phase loss less than 60 degrees up to 10 Hz. Spring rendering demonstrated 1% mean error in stiffness, and damper rendering performed comparably at 2.5%. Virtual mass rendering was less accurate but successful in varying perceived mass. NOTTABIKE will be used to study lower-limb motor adaptation in intact and impaired persons and to develop rehabilitation protocols that promote volitional movement recovery.
Figures






References
-
- Shadmehr R and Mussa-Ivaldi F, “Adaptive representation of dynamics during learning of a motor task,” J. Neurosci, vol. 14, no. 5, pp. 3208–3224, May 1994, Accessed: Aug. 12, 2011 [Online]. Available: http://www.jneurosci.org/content/14/5/3208.abstract. - PMC - PubMed
-
- Abdollahi F et al. , “Error augmentation enhancing arm recovery in individuals with chronic stroke a randomized crossover design,” Neurorehabil. Neural Repair, p. 1545968313498649, 2013, Accessed: Oct. 17, 2016 [Online]. Available: http://nnr.sagepub.com/content/early/2013/08/07/1545968313498649.abstract. - PMC - PubMed
-
- Patton JL, Stoykov ME, Kovic M, and Mussa-Ivaldi FA, “Evaluation of robotic training forces that either enhance or reduce error in chronic hemiparetic stroke survivors,” Exp. Brain Res, vol. 168, no. 3, pp. 368–383, 2006, Accessed: May 17, 2013 [Online]. Available: http://link.springer.com/article/10.1007/s00221-005-0097-8. - DOI - PubMed
