

A mini ROV-based method for recovering marine instruments at depth
- PMID: 32639980
- PMCID: PMC7343139
- DOI: 10.1371/journal.pone.0235321
A mini ROV-based method for recovering marine instruments at depth
Abstract
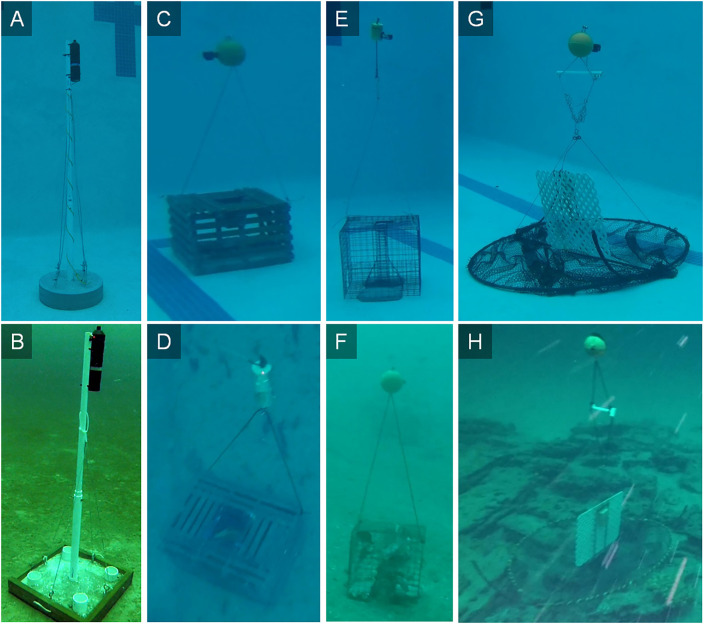
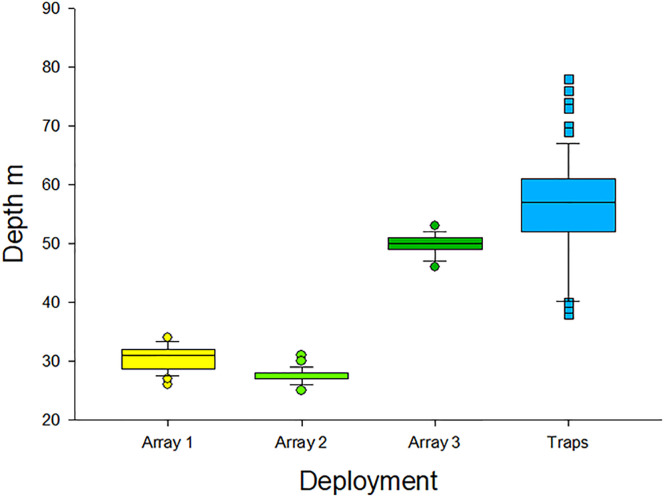
Instruments are often deployed at depth for weeks to years for a variety of marine applications. In many cases, divers can be deployed to retrieve instruments, but divers are constrained by depth limitations and safety concerns. Acoustic release technology can also be employed but can add considerable expense and acoustic releases will at times fail. Here, we report a simple method that utilizes a commercially available mooring hook integrated with a mini remotely operated vehicle to attach lines to instruments deployed on the sea floor, which can then be winched to the surface. The mooring hook apparatus was tested in a pool setting and then used to retrieve acoustic telemetry receiver bases (50 kg) or fish traps (30-50 kg) from the northern Gulf of Mexico continental shelf at depths between 28 and 80 m. During 2013-2019, 539 retrievals (100% success rate) were made of receiver bases (n = 239) and traps (n = 300) on 30 sea days using this approach. This method could easily be applied to other types of instruments, or recovery and salvage of objects that are too deep for standard diving operations.
Conflict of interest statement
The authors have declared that no competing interests exist.
Figures



References
-
- Clements S, Jepsen D, Karnowski M. Optimization of an acoustic telemetry array for detecting transmitter-implanted fish. N Am J Fish Manage. 2005; 25: 429–436. 10.1544/M03-224.1 - DOI
-
- Butler CB, Matthews TR. Effects of ghost fishing lobster traps in the Florida Keys. ICES. J Mar Sci. 2015; 72: 85–98. 10.1093/icesjms/fsu238 - DOI
-
- Schweitzer CC, Lipcius RN, Stevens BG. Impacts of multi-trap line on benthic habitat containing emergent epifauna within the Mid-Atlantic Bight. ICES J Mar Sci. 2018; 75: 2202–2212. 10.1093/icesjms/fsy109 - DOI
-
- Sayer MDJ. Scientific diving: a bibliographic analysis of underwater research supported by SCUBA diving 1995–2006. Int J Soc Underw Technol. 2007; 27: 75–94. Available from: https://www.ingentaconnect.com/content/sut/unwt/2007/00000027/00000003/a...
-
- Agar JJ, Waters JR, Valdés-Pizzini M, Shivlani M, Murray T, Kirkley JE, et al. Caribbean fish trap fishery socioeconomic study. Bull Mar Sci. 2008; 82: 315–331. Available from: https://scholarworks.wm.edu/vimsarticles/1506
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
