Computation Through Neural Population Dynamics
- PMID: 32640928
- PMCID: PMC7402639
- DOI: 10.1146/annurev-neuro-092619-094115
Computation Through Neural Population Dynamics
Abstract
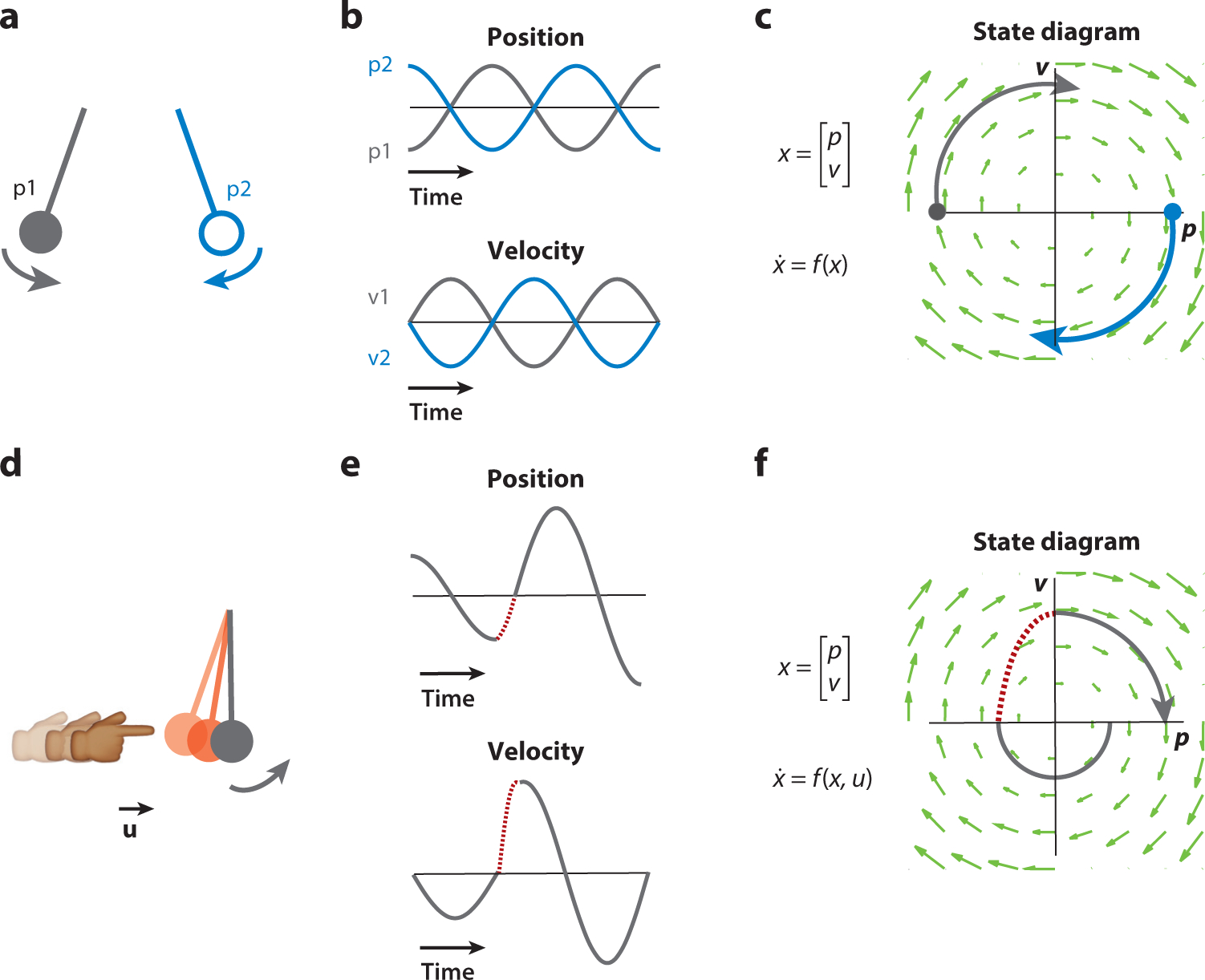
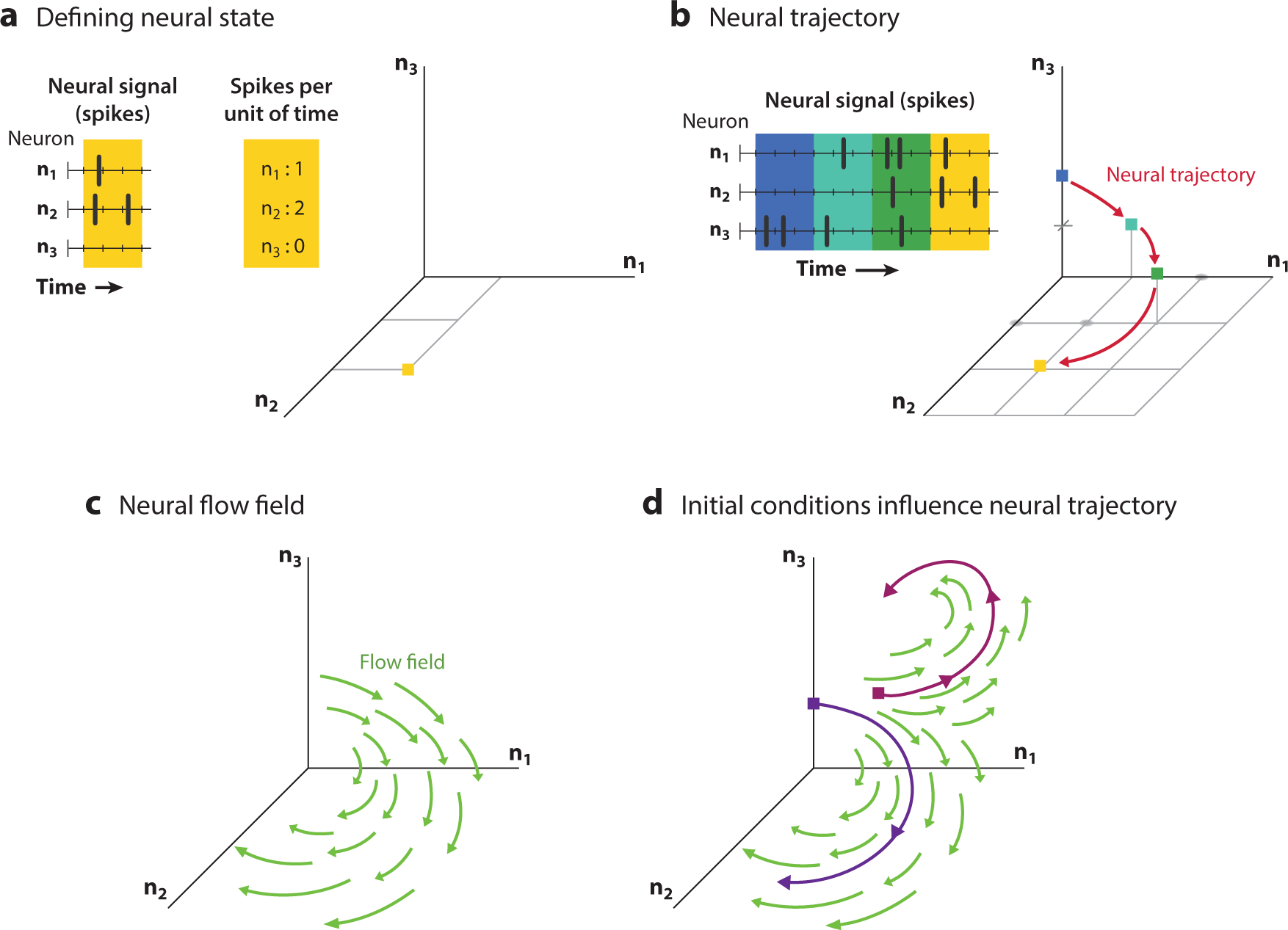
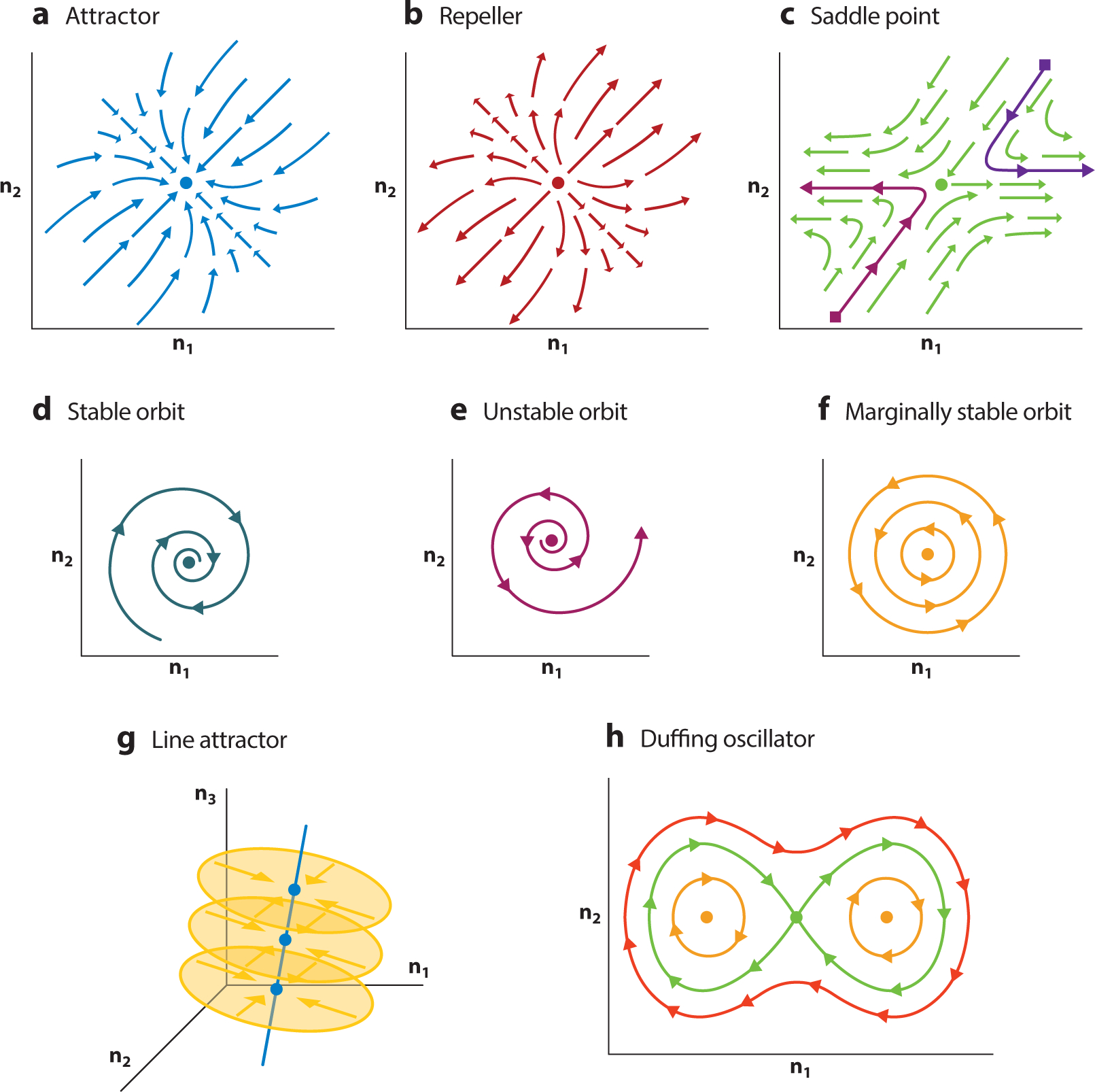
Significant experimental, computational, and theoretical work has identified rich structure within the coordinated activity of interconnected neural populations. An emerging challenge now is to uncover the nature of the associated computations, how they are implemented, and what role they play in driving behavior. We term this computation through neural population dynamics. If successful, this framework will reveal general motifs of neural population activity and quantitatively describe how neural population dynamics implement computations necessary for driving goal-directed behavior. Here, we start with a mathematical primer on dynamical systems theory and analytical tools necessary to apply this perspective to experimental data. Next, we highlight some recent discoveries resulting from successful application of dynamical systems. We focus on studies spanning motor control, timing, decision-making, and working memory. Finally, we briefly discuss promising recent lines of investigation and future directions for the computation through neural population dynamics framework.
Keywords: dynamical systems; neural computation; neural population dynamics; state spaces.
Figures
References
-
- Adamantidis A, Arber S, Bains JS, Bamberg E, Bonci A, et al. 2015. Optogenetics: 10 years after ChR2 in neurons—views from the community. Nat. Neurosci 18:1202–12 - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources