

Reconfigurable microbots folded from simple colloidal chains
- PMID: 32680965
- PMCID: PMC7414297
- DOI: 10.1073/pnas.2007255117
Reconfigurable microbots folded from simple colloidal chains
Abstract
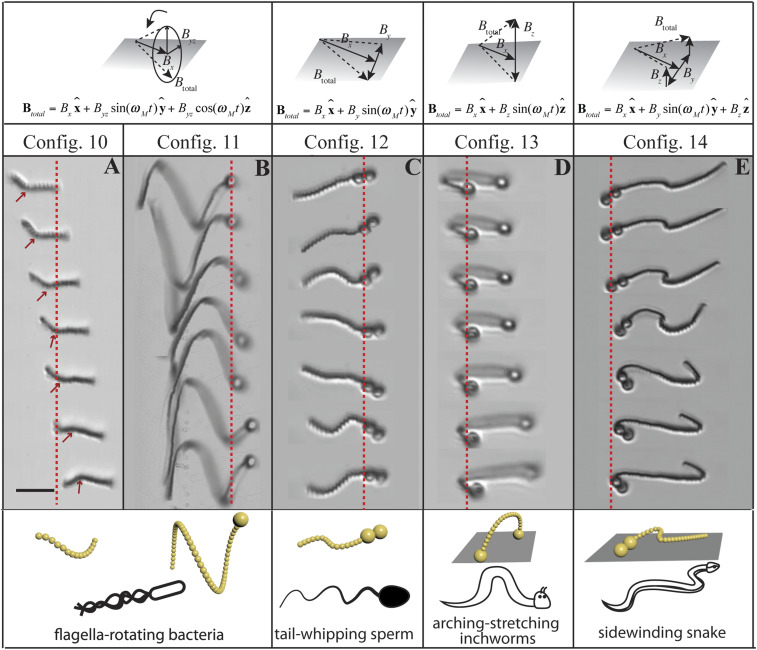
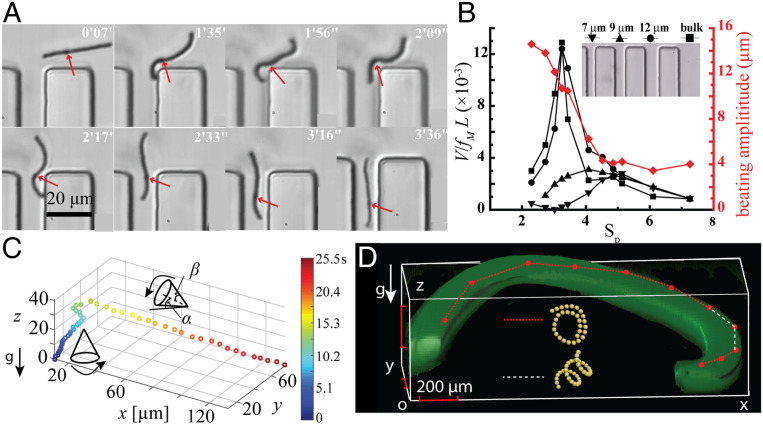
To overcome the reversible nature of low-Reynolds-number flow, a variety of biomimetic microrobotic propulsion schemes and devices capable of rapid transport have been developed. However, these approaches have been typically optimized for a specific function or environment and do not have the flexibility that many real organisms exhibit to thrive in complex microenvironments. Here, inspired by adaptable microbes and using a combination of experiment and simulation, we demonstrate that one-dimensional colloidal chains can fold into geometrically complex morphologies, including helices, plectonemes, lassos, and coils, and translate via multiple mechanisms that can be varied with applied magnetic field. With chains of multiblock asymmetry, the propulsion mode can be switched from bulk to surface-enabled, mimicking the swimming of microorganisms such as flagella-rotating bacteria and tail-whipping sperm and the surface-enabled motion of arching and stretching inchworms and sidewinding snakes. We also demonstrate that reconfigurability enables navigation through three-dimensional and narrow channels simulating capillary blood vessels. Our results show that flexible microdevices based on simple chains can transform both shape and motility under varying magnetic fields, a capability we expect will be particularly beneficial in complex in vivo microenvironments.
Keywords: chain; colloids; directed assembly; magnetic field; microbot.
Conflict of interest statement
The authors declare no competing interest.
Figures



References
-
- Purcell E. M., Life at low Reynolds number. Am. J. Phys. 45, 3–11 (1977).
-
- Berg H. C., Brown D. A., Chemotaxis in Escherichia coli analysed by three-dimensional tracking. Nature 239, 500–504 (1972). - PubMed
Publication types
MeSH terms
Substances
Grants and funding
LinkOut - more resources
Full Text Sources
