

Performance monitoring for sensorimotor confidence: A visuomotor tracking study
- PMID: 32771212
- PMCID: PMC7669557
- DOI: 10.1016/j.cognition.2020.104396
Performance monitoring for sensorimotor confidence: A visuomotor tracking study
Abstract
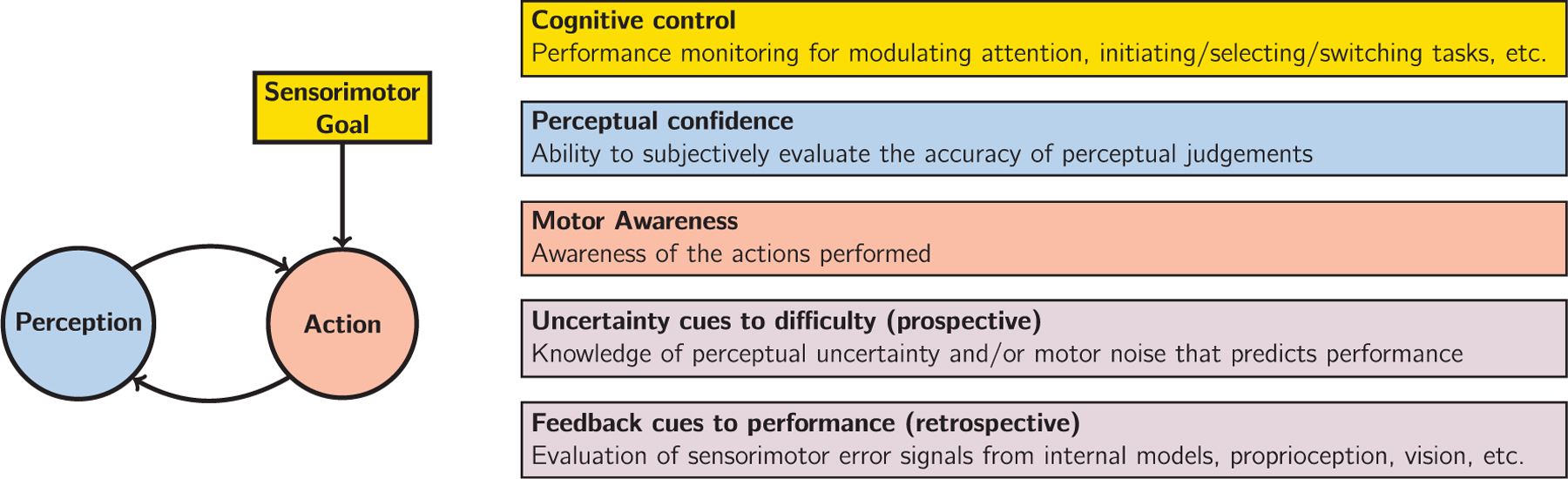
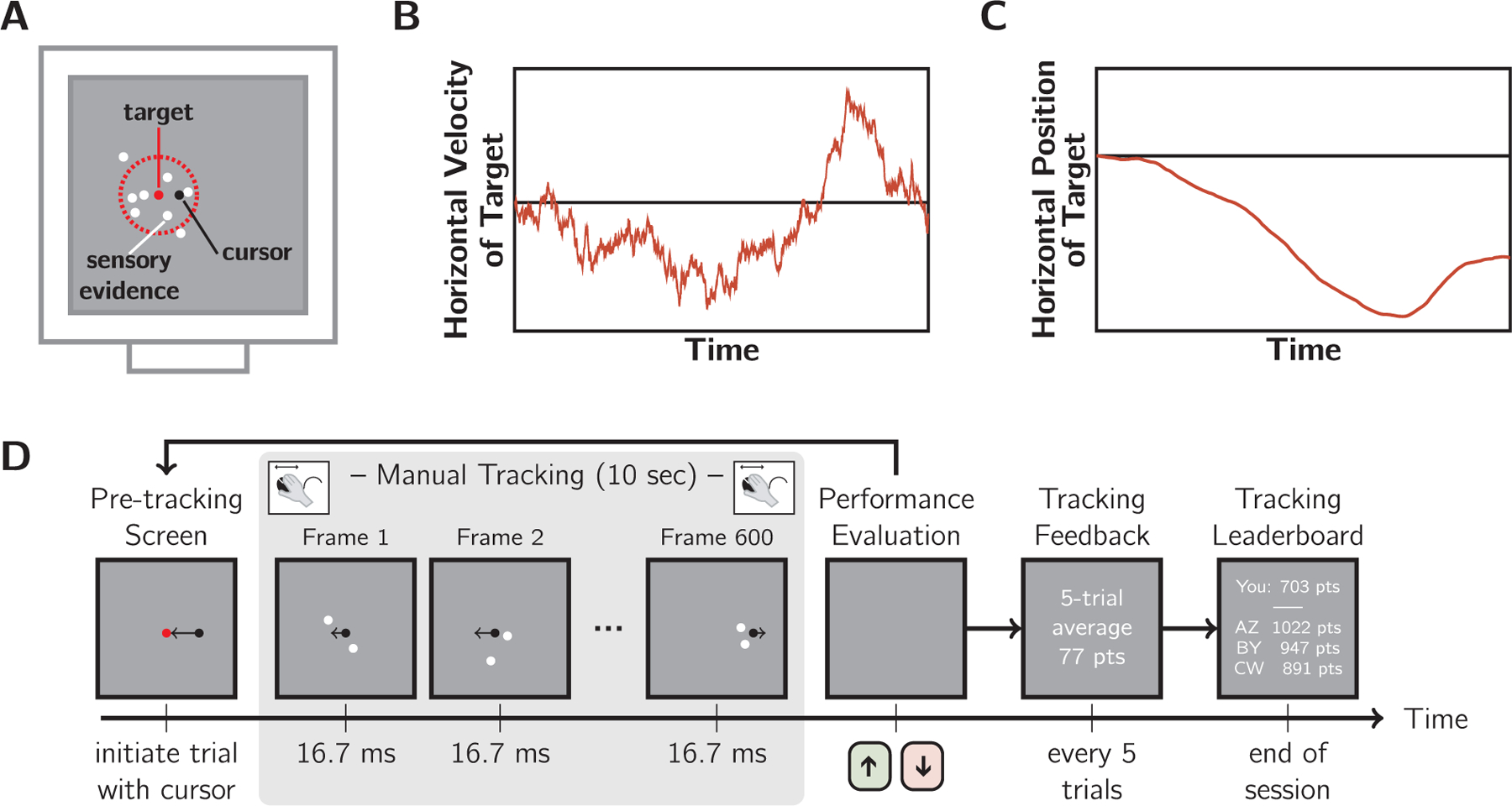
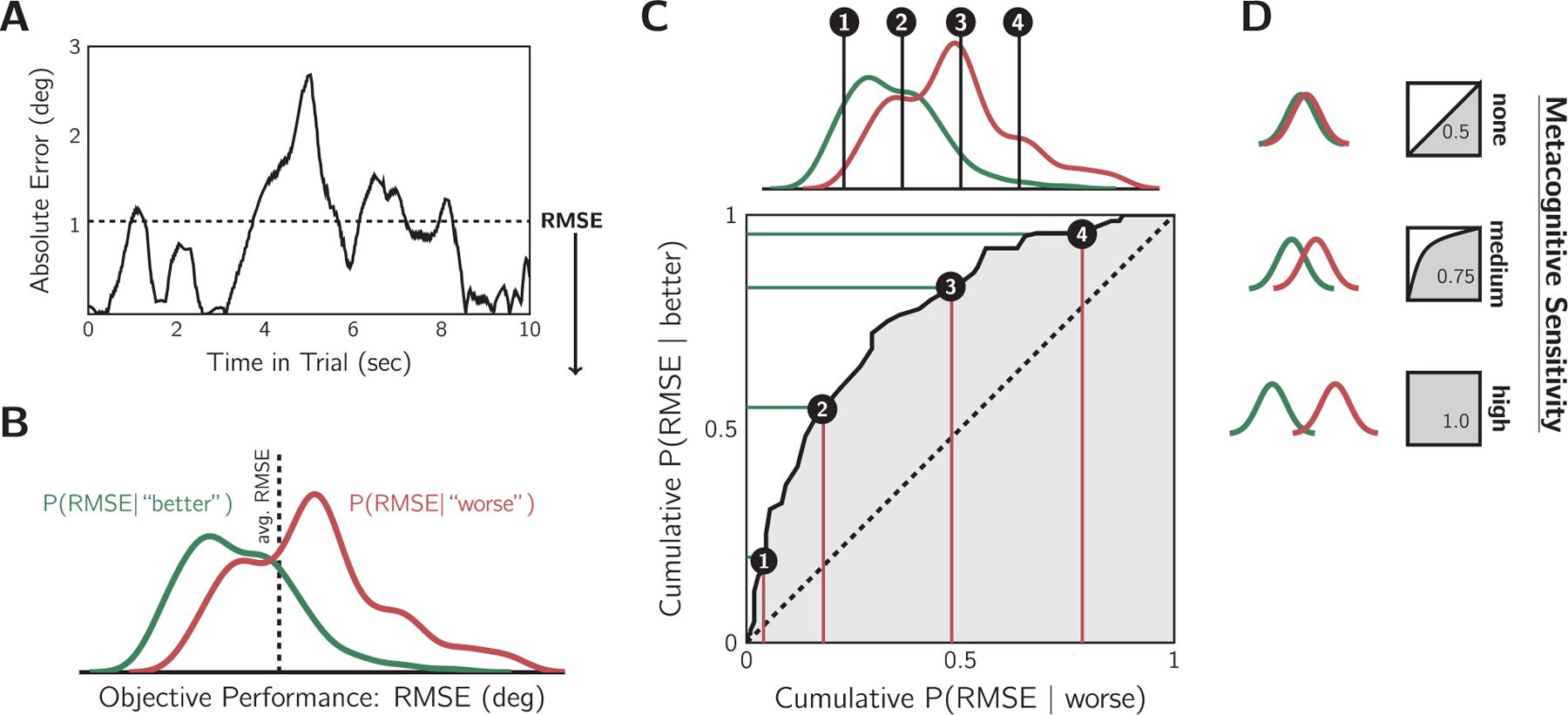
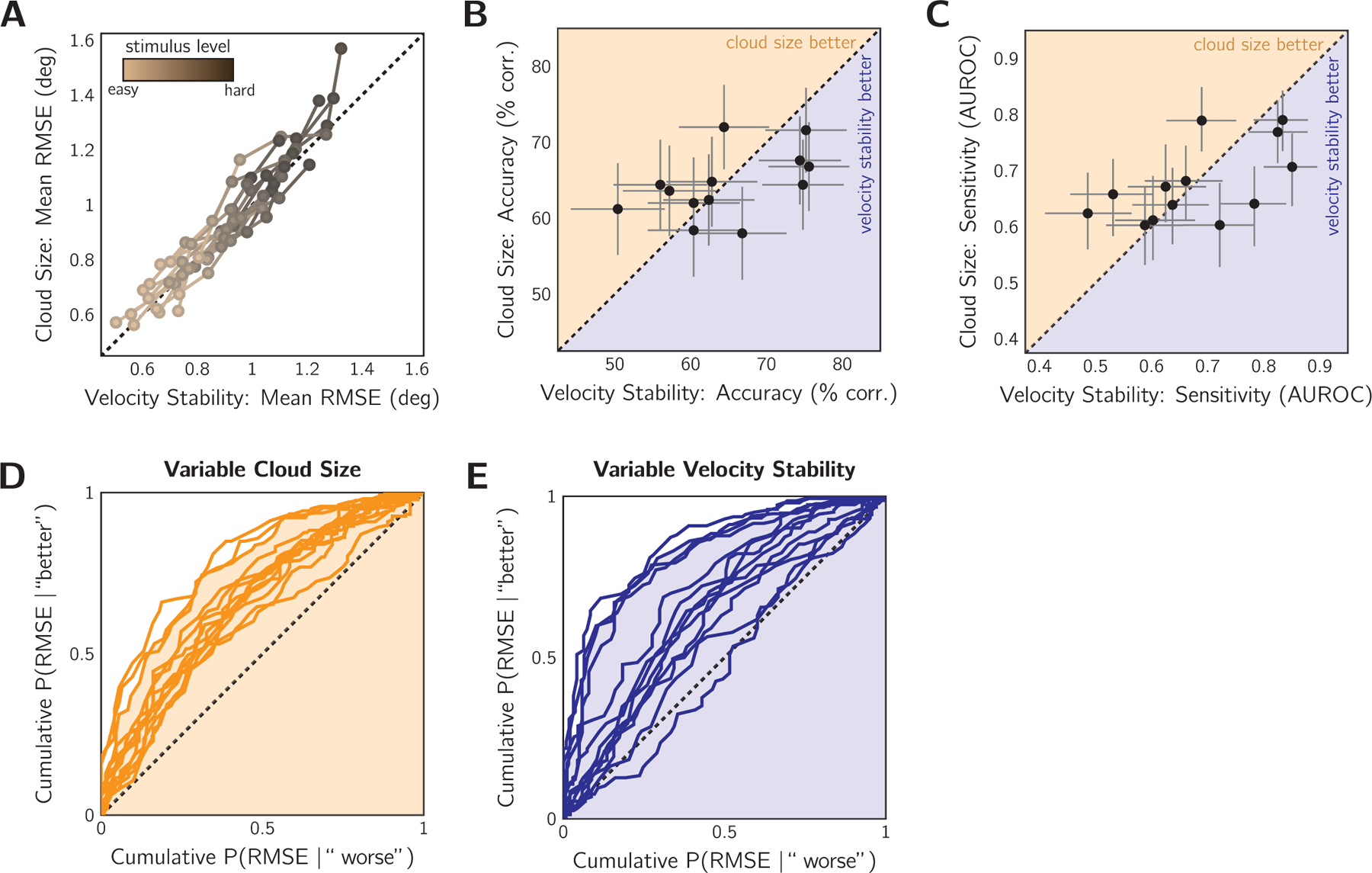
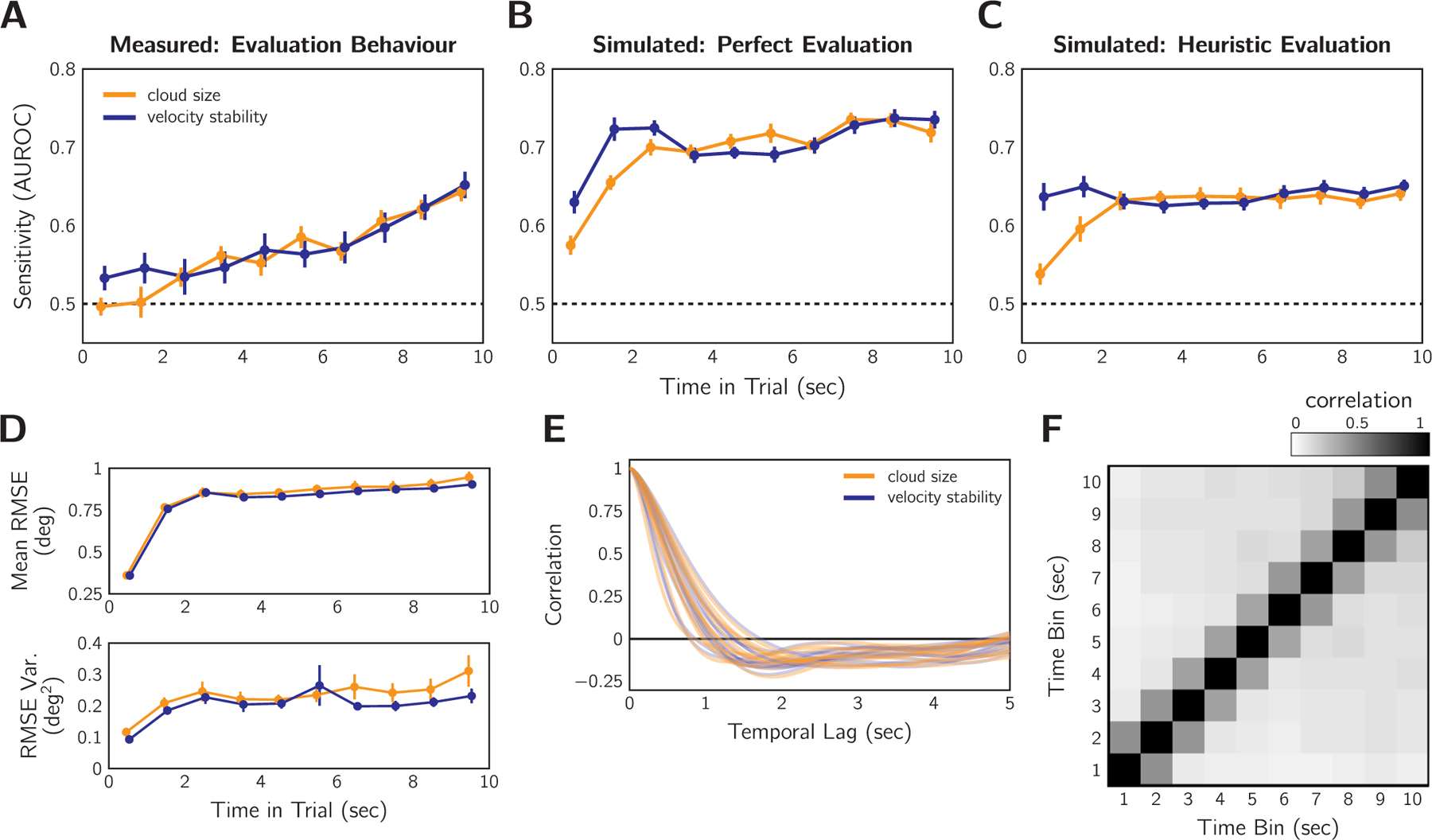
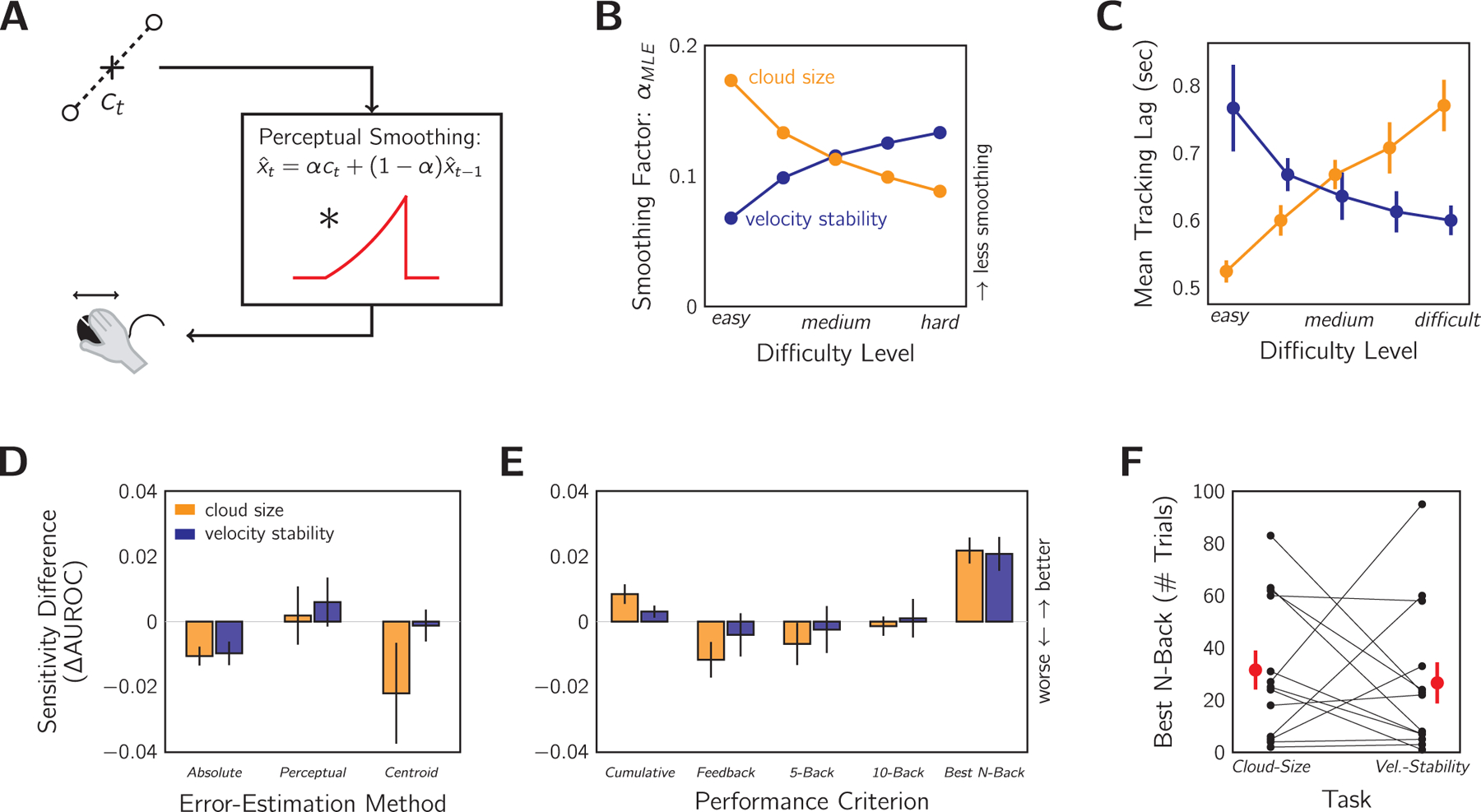
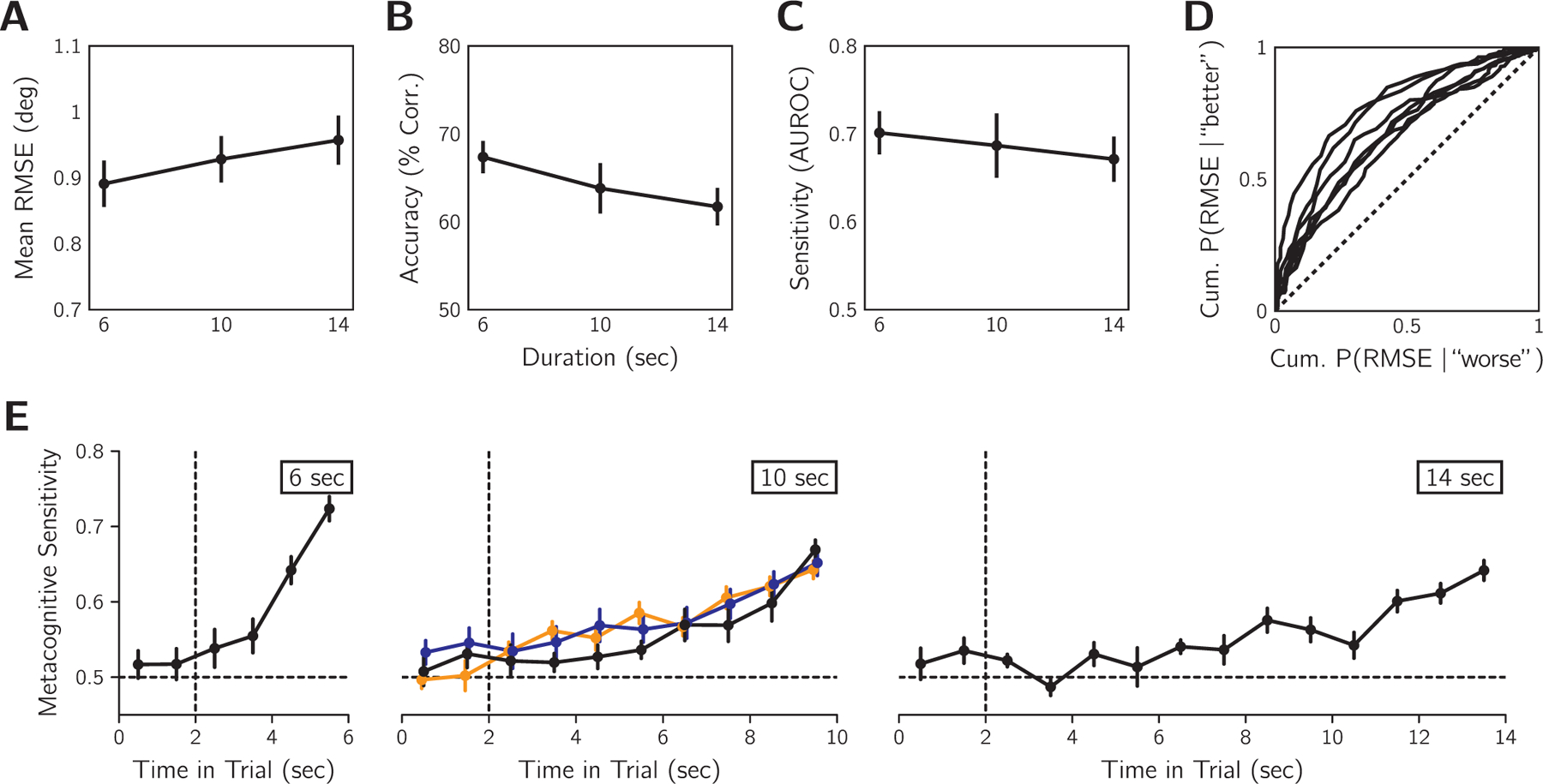
To best interact with the external world, humans are often required to consider the quality of their actions. Sometimes the environment furnishes rewards or punishments to signal action efficacy. However, when such feedback is absent or only partial, we must rely on internally generated signals to evaluate our performance (i.e., metacognition). Yet, very little is known about how humans form such judgements of sensorimotor confidence. Do they monitor their actual performance or do they rely on cues to sensorimotor uncertainty? We investigated sensorimotor metacognition in two visuomotor tracking experiments, where participants followed an unpredictably moving dot cloud with a mouse cursor as it followed a random horizontal trajectory. Their goal was to infer the underlying target generating the dots, track it for several seconds, and then report their confidence in their tracking as better or worse than their average. In Experiment 1, we manipulated task difficulty with two methods: varying the size of the dot cloud and varying the stability of the target's velocity. In Experiment 2, the stimulus statistics were fixed and duration of the stimulus presentation was varied. We found similar levels of metacognitive sensitivity in all experiments, which was evidence against the cue-based strategy. The temporal analysis of metacognitive sensitivity revealed a recency effect, where error later in the trial had a greater influence on the sensorimotor confidence, consistent with a performance-monitoring strategy. From these results, we conclude that humans predominantly monitored their tracking performance, albeit inefficiently, to build a sense of sensorimotor confidence.
Keywords: Action; Confidence; Metacognition; Perception; Sensorimotor; Tracking.
Copyright © 2020 Elsevier B.V. All rights reserved.
Figures
Similar articles
-
Sensorimotor confidence for tracking eye movements.J Vis. 2024 Aug 1;24(8):12. doi: 10.1167/jov.24.8.12. J Vis. 2024. PMID: 39177998 Free PMC article.
-
Sensorimotor conflicts alter metacognitive and action monitoring.Cortex. 2020 Mar;124:224-234. doi: 10.1016/j.cortex.2019.12.001. Epub 2019 Dec 19. Cortex. 2020. PMID: 31927241
-
Metacognitive judgments during visuomotor learning reflect the integration of error history.J Neurophysiol. 2023 Aug 1;130(2):264-277. doi: 10.1152/jn.00022.2023. Epub 2023 Jun 28. J Neurophysiol. 2023. PMID: 37377281
-
Metacognition and Confidence: A Review and Synthesis.Annu Rev Psychol. 2024 Jan 18;75:241-268. doi: 10.1146/annurev-psych-022423-032425. Epub 2023 Sep 18. Annu Rev Psychol. 2024. PMID: 37722748 Review.
-
On the proposed role of metacognition in environment learning: recommendations for research.Cogn Res Princ Implic. 2022 Dec 27;7(1):104. doi: 10.1186/s41235-022-00454-x. Cogn Res Princ Implic. 2022. PMID: 36575318 Free PMC article. Review.
Cited by
-
Quick balance skill improvement after short-term training with error amplification feedback for older adults.NPJ Sci Learn. 2023 Jan 12;8(1):3. doi: 10.1038/s41539-022-00151-w. NPJ Sci Learn. 2023. PMID: 36635300 Free PMC article.
-
Action-based confidence sharing and collective decision making.iScience. 2024 Sep 20;27(10):111006. doi: 10.1016/j.isci.2024.111006. eCollection 2024 Oct 18. iScience. 2024. PMID: 39429786 Free PMC article.
-
Dopamine precursor depletion affects performance and confidence judgements when events are timed from an explicit, but not an implicit onset.Sci Rep. 2023 Dec 11;13(1):21933. doi: 10.1038/s41598-023-47843-w. Sci Rep. 2023. PMID: 38081860 Free PMC article.
-
Consensus Goals in the Field of Visual Metacognition.Perspect Psychol Sci. 2022 Nov;17(6):1746-1765. doi: 10.1177/17456916221075615. Epub 2022 Jul 15. Perspect Psychol Sci. 2022. PMID: 35839099 Free PMC article.
-
Suprathreshold perceptual decisions constrain models of confidence.PLoS Comput Biol. 2022 Jul 27;18(7):e1010318. doi: 10.1371/journal.pcbi.1010318. eCollection 2022 Jul. PLoS Comput Biol. 2022. PMID: 35895747 Free PMC article.
References
-
- Atkinson RC, & Shiffrin RM (1968). Human memory: A proposed system and its control processes. Psychology of Learning and Motivation, 2, 89–195.
-
- Augustyn JS, & Rosenbaum DA (2005). Metacognitive control of action: Preparation for aiming reflects knowledge of Fitts’s law. Psychonomic Bulletin and Review, 12(5), 911–916. - PubMed
-
- Baranski JV, & Petrusic WM (1998). Probing the locus of confidence judgments: Experiments on the time to determine confidence. Journal of Experimental Psychology: Human Perception and Performance, 24(3), 929–945. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
