

Effects of Topology Optimization in Multimaterial 3D Bioprinting of Soft Actuators
- PMID: 32782990
- PMCID: PMC7415864
- DOI: 10.18063/ijb.v6i2.260.
Effects of Topology Optimization in Multimaterial 3D Bioprinting of Soft Actuators
Erratum in
-
ERRATUM.Int J Bioprint. 2020 Sep 17;6(4):309. doi: 10.18063/ijb.v6i4.309. eCollection 2020. Int J Bioprint. 2020. PMID: 33102924 Free PMC article.
Abstract
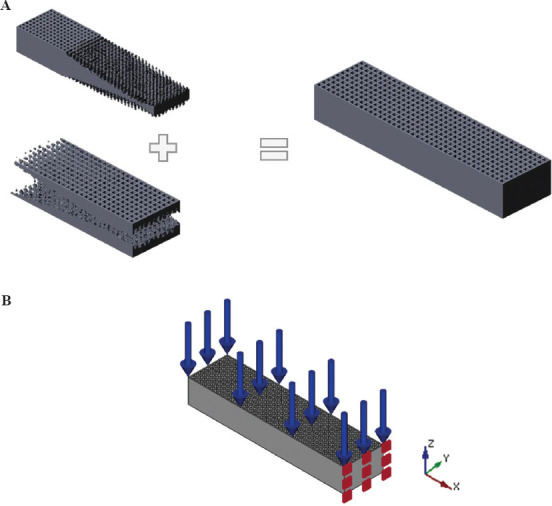
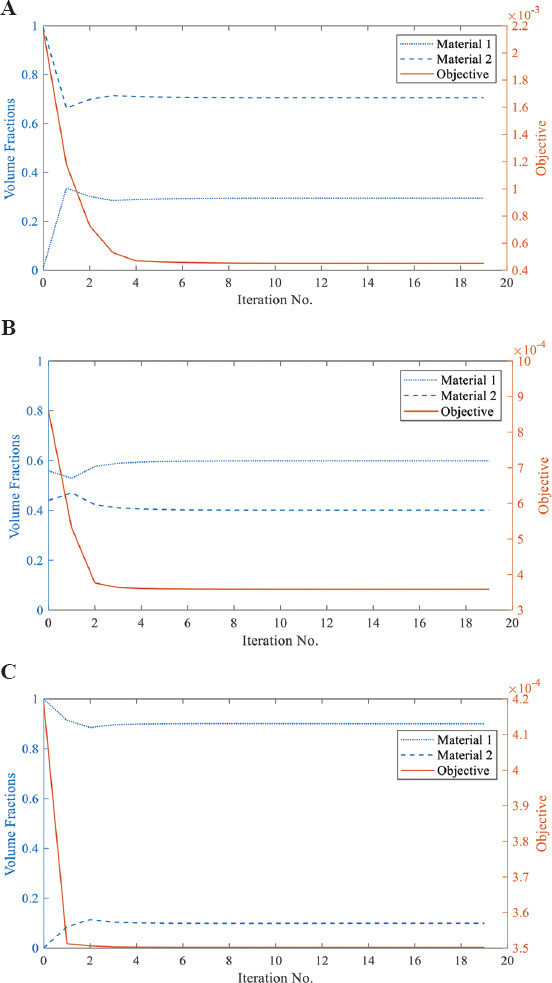
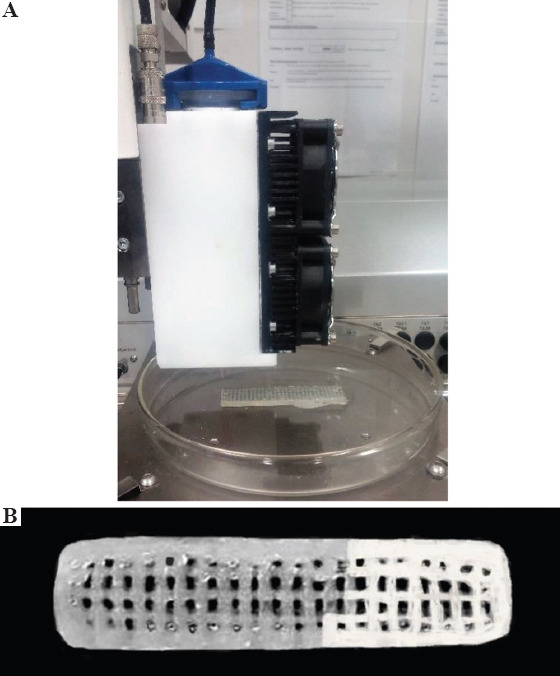
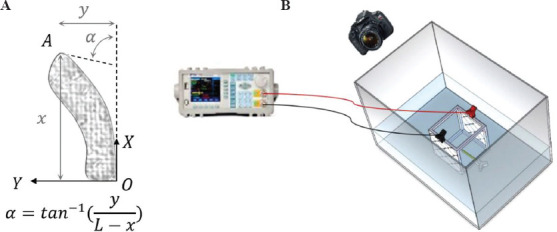
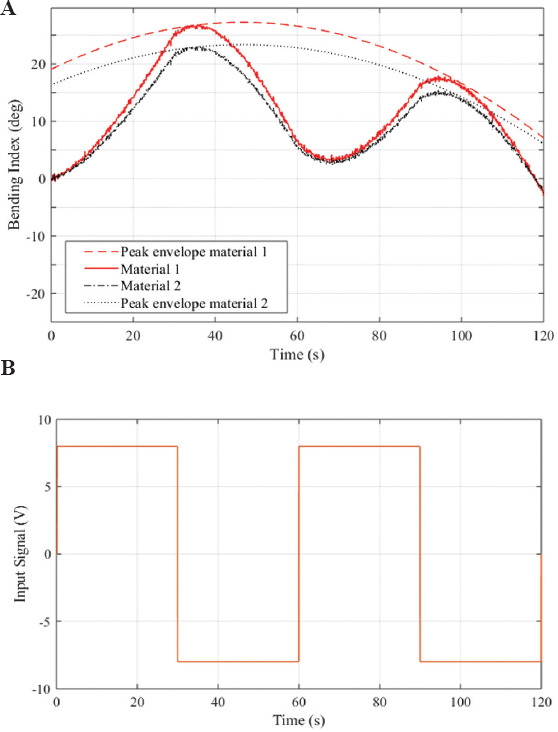
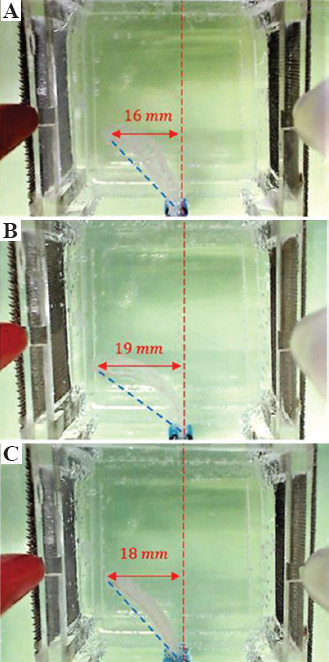
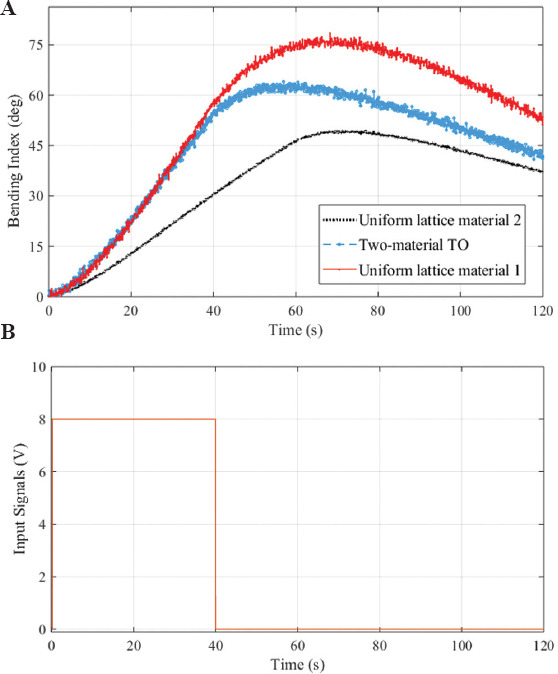
Recently, there has been a proliferation of soft robots and actuators that exhibit improved capabilities and adaptability through three-dimensional (3D) bioprinting. Flexibility and shape recovery attributes of stimuli-responsive polymers as the main components in the production of these dynamic structures enable soft manipulations in fragile environments, with potential applications in biomedical and food sectors. Topology optimization (TO), when used in conjunction with 3D bioprinting with optimal design features, offers new capabilities for efficient performance in compliant mechanisms. In this paper, multimaterial TO analysis is used to improve and control the bending performance of a bioprinted soft actuator with electrolytic stimulation. The multimaterial actuator performance is evaluated by the amplitude and rate of bending motion and compared with the single material printed actuator. The results demonstrated the efficacy of multimaterial 3D bioprinting optimization for the rate of actuation and bending.
Keywords: Multimaterial; Soft actuator; Soft robot; Three-dimensional bioprinting; Topology optimization.
Copyright: © 2020 Zolfagharian, et al.
Figures
References
-
- Cohen E, Trimmer BA, Vikas V, et al. American Society of Mechanical Engineers. New York: 2015. Design Methodologies for Soft-Material Robots Through Additive Manufacturing, From Prototyping to Locomotion in ASME 2015 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. DOI:10.1115/detc2015-47507.
-
- Bodaghi M, Damanpack A, Liao W. Adaptive Metamaterials by Functionally Graded 4D Printing. Mater Des. 2017;135:26–36. DOI:10.1016/j.matdes.2017.08.069.
-
- Choong YY, Maleksaeedi S, Eng H, et al. High Speed 4D Printing of Shape Memory Polymers with Nanosilica. Appl Mater Today. 2020;18(100515) DOI:10.1016/j.apmt.2019.100515.
-
- Zolfagharian A, Khoo S, Kouzani A, et al. Evolution of 3D Printed Soft Actuators. J Sens Actuators A Physical. 2016;250:258–72. DOI:10.1016/j.sna.2016.09.028.
-
- Bodaghi M, Zolfagharian A, Serjouei A, et al. Reversible Energy Absorbing Meta-Sandwiches by 4D FDM Printing. Int J Mech Sci. 2020;173:105451. DOI:10.1016/j.ijmecsci.2020.105451.
LinkOut - more resources
Full Text Sources