

Superb Monocular Depth Estimation Based on Transfer Learning and Surface Normal Guidance
- PMID: 32867293
- PMCID: PMC7506624
- DOI: 10.3390/s20174856
Superb Monocular Depth Estimation Based on Transfer Learning and Surface Normal Guidance
Abstract
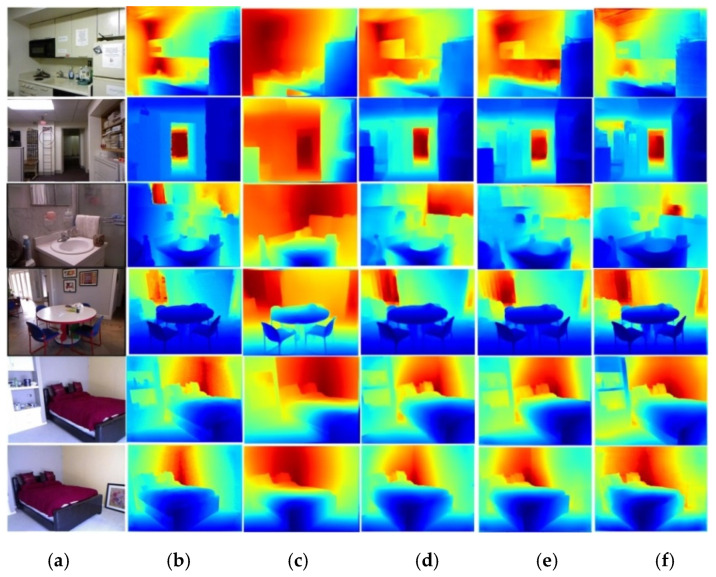
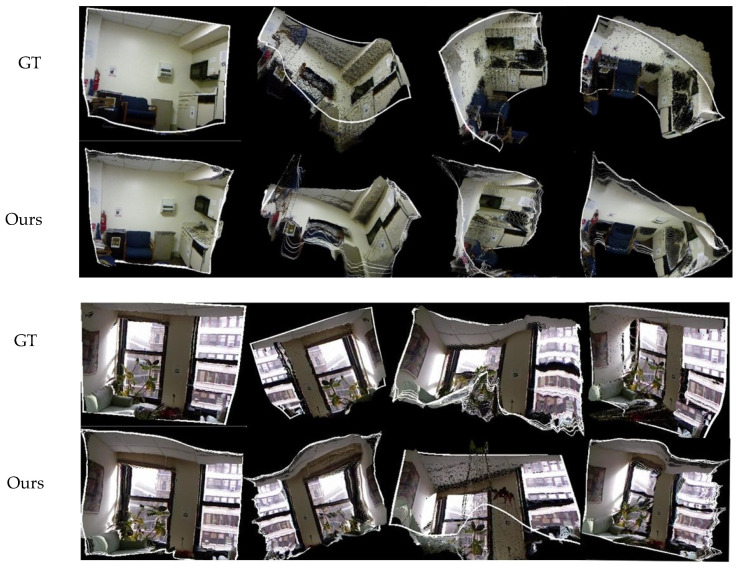
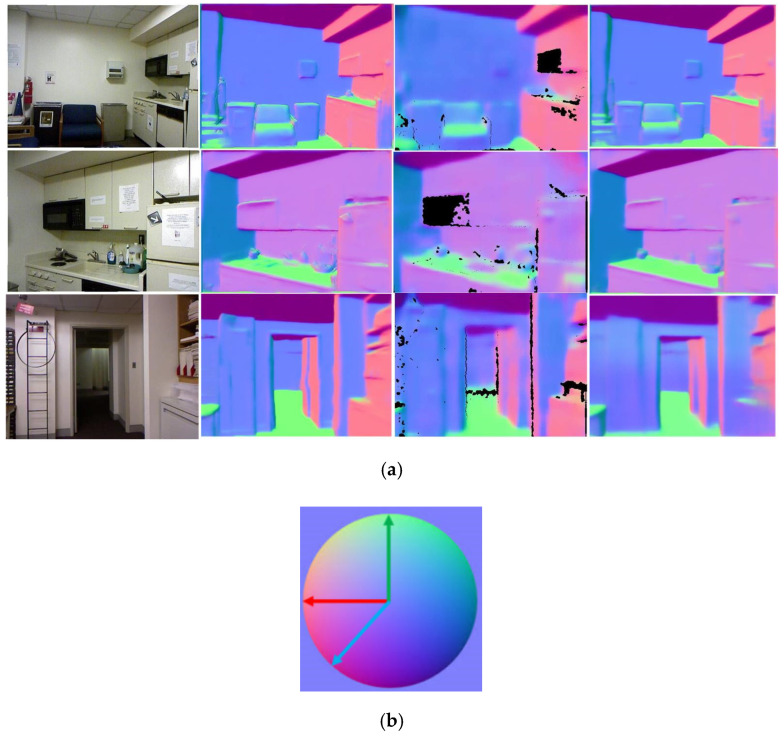
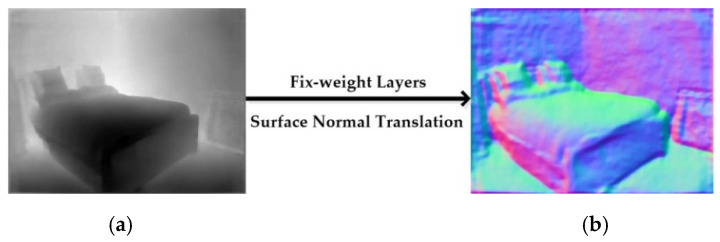
Accurately sensing the surrounding 3D scene is indispensable for drones or robots to execute path planning and navigation. In this paper, a novel monocular depth estimation method was proposed that primarily utilizes a lighter-weight Convolutional Neural Network (CNN) structure for coarse depth prediction and then refines the coarse depth images by combining surface normal guidance. Specifically, the coarse depth prediction network is designed as pre-trained encoder-decoder architecture for describing the 3D structure. When it comes to surface normal estimation, the deep learning network was designed as a two-stream encoder-decoder structure, which hierarchically merges red-green-blue-depth (RGB-D) images for capturing more accurate geometric boundaries. Relying on fewer network parameters and simpler learning structure, better detailed depth maps are produced than the existing states. Moreover, 3D point cloud maps reconstructed from depth prediction images confirm that our framework can be conveniently adopted as components of a monocular simultaneous localization and mapping (SLAM) paradigm.
Keywords: SFM; SLAM; monocular depth estimation; multi-task learning; supervised deep learning; surface normal estimation; transfer learning.
Conflict of interest statement
The authors declare no conflict of interest.
Figures










Similar articles
-
Deep Learning-Based Monocular Depth Estimation Methods-A State-of-the-Art Review.Sensors (Basel). 2020 Apr 16;20(8):2272. doi: 10.3390/s20082272. Sensors (Basel). 2020. PMID: 32316336 Free PMC article. Review.
-
Deep Neural Networks for Accurate Depth Estimation with Latent Space Features.Biomimetics (Basel). 2024 Dec 9;9(12):747. doi: 10.3390/biomimetics9120747. Biomimetics (Basel). 2024. PMID: 39727751 Free PMC article.
-
Residual Vision Transformer and Adaptive Fusion Autoencoders for Monocular Depth Estimation.Sensors (Basel). 2024 Dec 26;25(1):80. doi: 10.3390/s25010080. Sensors (Basel). 2024. PMID: 39796871 Free PMC article.
-
Self-supervised Monocular Depth Estimation with 3D Displacement Module for Laparoscopic Images.IEEE Trans Med Robot Bionics. 2022 May;4(2):331-334. doi: 10.1109/TMRB.2022.3170206. IEEE Trans Med Robot Bionics. 2022. PMID: 36148138 Free PMC article.
-
A Survey of Robotic Monocular Pose Estimation.Sensors (Basel). 2025 Feb 28;25(5):1519. doi: 10.3390/s25051519. Sensors (Basel). 2025. PMID: 40096369 Free PMC article. Review.
Cited by
-
Monocular Depth Estimation with Joint Attention Feature Distillation and Wavelet-Based Loss Function.Sensors (Basel). 2020 Dec 24;21(1):54. doi: 10.3390/s21010054. Sensors (Basel). 2020. PMID: 33374278 Free PMC article.
-
Potential Obstacle Detection Using RGB to Depth Image Encoder-Decoder Network: Application to Unmanned Aerial Vehicles.Sensors (Basel). 2022 Sep 5;22(17):6703. doi: 10.3390/s22176703. Sensors (Basel). 2022. PMID: 36081162 Free PMC article.
-
Monocular Depth Estimation: Lightweight Convolutional and Matrix Capsule Feature-Fusion Network.Sensors (Basel). 2022 Aug 23;22(17):6344. doi: 10.3390/s22176344. Sensors (Basel). 2022. PMID: 36080801 Free PMC article.
References
-
- Guizilini V., Ambrus R., Pillai S., Gaidon A. Packnet-sfm: 3d packing for self-supervised monocular depth estimation. arXiv. 20191905.02693
-
- Ummenhofer B., Zhou H., Uhrig J., Mayer N., Ilg E., Dosovitskiy A., Brox T. Demon: Depth and motion network for learning monocular stereo; Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition; Honolulu, HI, USA. 21–26 July 2017; pp. 5622–5631.
-
- Zhou H., Ummenhofer B., Brox T. Deeptam: Deep tracking and mapping; Proceedings of the European Conference on Computer Visio (ECCV); Munich, Germany. 8–14 September 2018; pp. 822–838.
-
- Yu C., Liu Z., Liu X., Xie F., Yang Y., Wei Q., Fei Q. DS-SLAM: A Semantic Visual SLAM towards Dynamic Environments; Proceedings of the 2018 IEEE International Conference on Intelligent Robots and Systems (IROS); Madrid, Spain. 1–5 October 2018; pp. 1168–1174.
-
- Huang G., Liu Z., Maaten L., Weinberger K.Q. Densely connected convolutional networks; Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition; Honolulu, HI, USA. 21–26 July 2017; pp. 2261–2269.
LinkOut - more resources
Full Text Sources
